Hi!
Thanks for the tutorial. I need to verify something:
Did I set the current correctly? Let’s check it:
- Stepper#1 = using it in Bipolar mode, Voltage rating 4V, Current rating: 1200mA
- Stepper#2 = using it in Bipolar mode, Voltage rating 3.8V, Current rating: 670mA
I’m using a 12V DC power supply (80 W) for: 2Stepper#1 and 1Stepper#2 => VMOT is at 12V DC for each stepper.
According to the tutorial, the current should be limited during the calibrating stage to 70% of the nominal value (per coil) of the stepper.
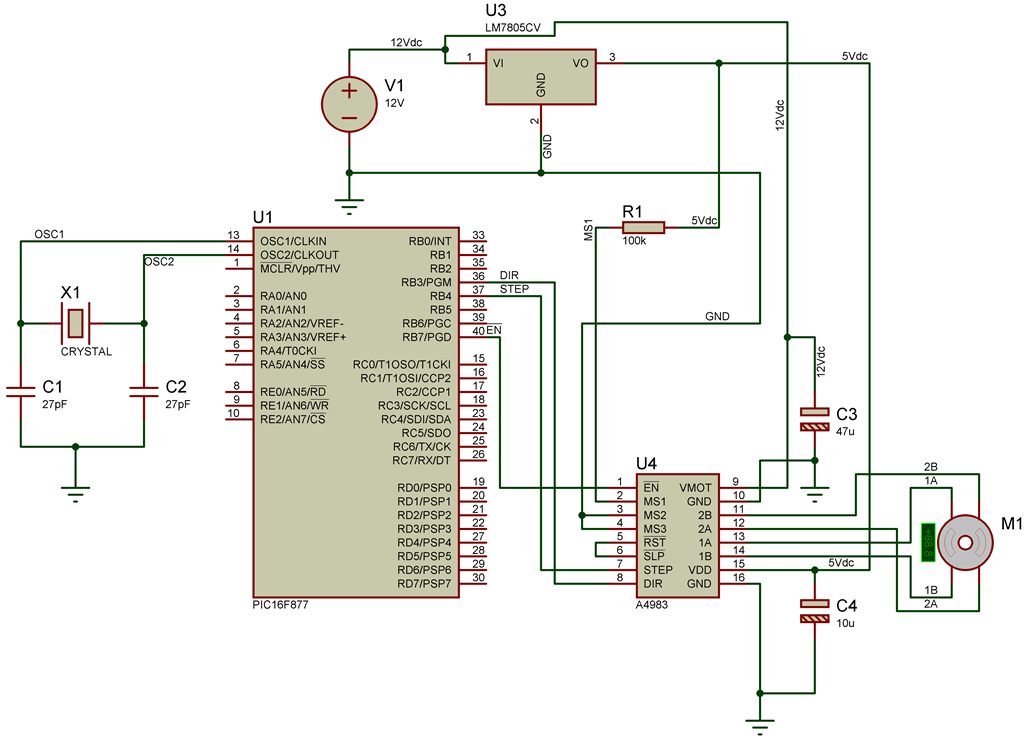
So, I have: 469mA for Stepper#2 and 840mA for Stepper#1. I did calibrate those. Next phase was to test the steppers. I’ve picked the small one (Stepper#2) and done the connections as seen in the picture (attachement), on a breadboard.
I’ve used JAL to write the code you’ve provided for the testing:
include 16f877_20
include jpic
include jdelay
var bit DIR is pin_b1 -- alias
pin_b1_direction = output
var bit STEP is pin_b4 -- alias
pin_b4_direction = output
var bit _EN is pin_b7 -- alias
pin_b7_direction = output
_EN = high -- driver->coil outputs are disabled
procedure clockwise is
DIR = low
STEP = low
delay_2us -- delay time
STEP = high
delay_2us -- delay time
end procedure
_EN = low -- activating the driver's outputs
delay_2us -- delay time
for 10001 loop -- 10001 cycles loop
clockwise
end loop
As you see, this sample contains only the code needed for the clockwise rotation, since that is my freaking problem right now  .
.
Those being said, I’ve programed the μctrl and done the connections. I’ve checked them for 8 time already, they are properly done since the stepper rotates counterclockwise (with DIR = high), but it does not rotate clockwise (with DIR = low). 
Any suggestions?
I’ve handled the driver and the motor properly → respected the warnings on the webpage and datasheet.
I’ve checked the connectivity of the pins soldered to the PCB driver. All of them are fine.
For safety, I’ll try to test the big stepper too … maybe something happened and the driver is malfunctioning. (I’m going to use the driver specially configured for that motor).
Be back with intel after the swap and test! Cheers!