
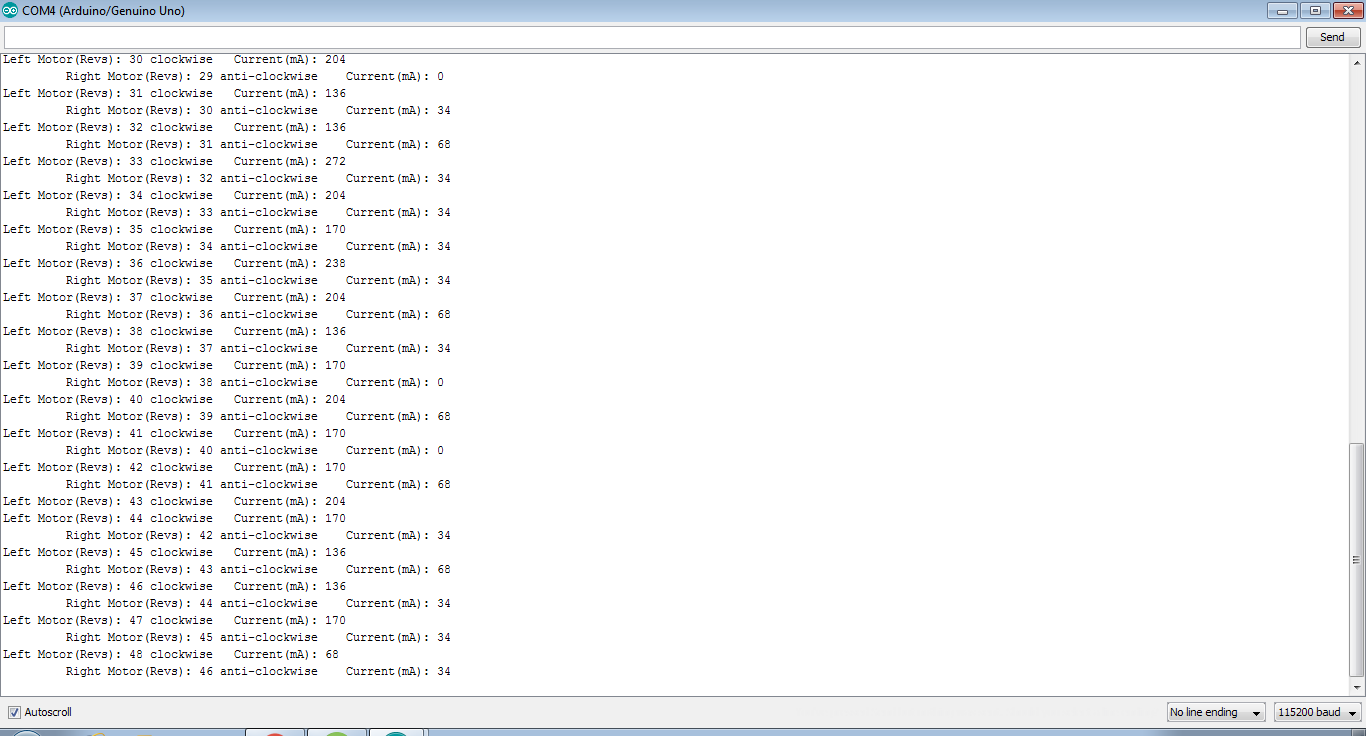
I am using the VNH2SP30 to control two 50:1 Geared motors with 64CPR Encoder. I have connected the CS1 and CS2 pins to A1 and A0 of Arduino. The current reading is very erratic and the one side is too low. Here is a screenshot from the motor running. As you can see the current of the right motor is too low even though both are running at the same speed according to the encoder. I checked using multimeter and the right motor is drawing 160-170mA.
All these values are at free run without any load.
Here is the code I am using.
[code]
//#define ENCODER_OPTIMIZE_INTERRUPTS
#include <Encoder.h>
#include <DualVNH5019MotorShield.h>
#define COUNTS_PER_REV 3200
//As per Pololu website 1200 ticks is to one revolution of motor shaft but experiments shows 2400
//Left Motor Pin Definitions
#define ENDIAG1 6
#define InA1 7
#define InB1 8
#define PWM1 9
#define CS1 A1
#define encA1 5
#define encB1 3
//Right Motor Pin Definitions
#define ENDIAG2 11
#define InA2 13
#define InB2 12
#define PWM2 10
#define CS2 A0
#define encA2 4
#define encB2 2
DualVNH5019MotorShield md(InA1,InB1,ENDIAG1,CS1,InA2,InB2,ENDIAG2,CS2);
Encoder en1(encA1,encB1);
Encoder en2(encA2,encB2);
int enc1_rpm,enc2_rpm;
void setup() {
md.init();
Serial.begin(115200);
Serial.println("Motor Driver and Encoder Test \n --------------------------");
}
void stopIfFault()
{
if (md.getM1Fault())
{
Serial.println(“M1 fault”);
while(1);
}
if (md.getM2Fault())
{
Serial.println(“M2 fault”);
while(1);
}
}
void loop() {
// put your main code here, to run repeatedly:
stopIfFault();
md.setSpeeds(200,200);
if (en1.read()>COUNTS_PER_REV|| en1.read()<-COUNTS_PER_REV)
{
//1 Revoultion complete
enc1_rpm++;
Serial.print("Left Motor(Revs): ");
Serial.print(enc1_rpm);
if (en1.read()<0)
Serial.print(" anti-clockwise");
else
Serial.print(" clockwise");
Serial.print("\t Current(mA): ");
Serial.print(md.getM1CurrentMilliamps());
en1.write(0);
Serial.println();
}
if (en2.read()>COUNTS_PER_REV|| en2.read()<-COUNTS_PER_REV)
{
//1 Revoultion complete
enc2_rpm++;
Serial.print("\t Right Motor(Revs): ");
Serial.print(enc2_rpm);
if (en2.read()<0)
Serial.print(" anti-clockwise");
else
Serial.print(" clockwise");
Serial.print("\t Current(mA): ");
Serial.print(md.getM2CurrentMilliamps());
en2.write(0);
Serial.println();
}
}[/code]
More information on my hardware setup is given in my previous post: https://forum.pololu.com/t/solved-pwm-not-working-in-vnh2sp30-motor-driver/8742/1