
Hello.
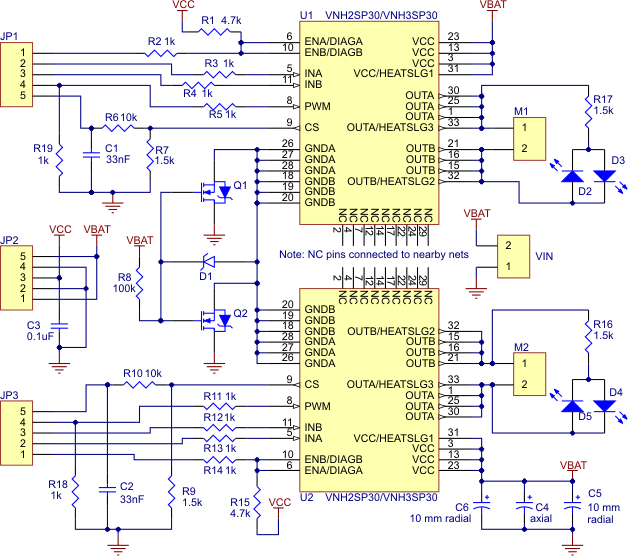
The circuitry for the current sensing for the two IC’s on the board is separated, as you can see in the schematic for the board.
It sounds like you have a pretty complicated setup to take these readings. You might try disconnecting everything from the board and testing the CS pins with a multimeter to measure the voltage to see if the cross-talk is still there.
By the way, the accuracy of the current sensing on these chips is limited, so if you want accurate measurements at low current, you will likely need to perform a calibration with a more accurate instrument. Also, the sensing circuitry within the IC is different for different rotation directions, so the calibration parameters could be different for running the motors in forward and reverse. If you want to know more about why this is the case, you might want to look at these two forum threads here and here.
-Nathan