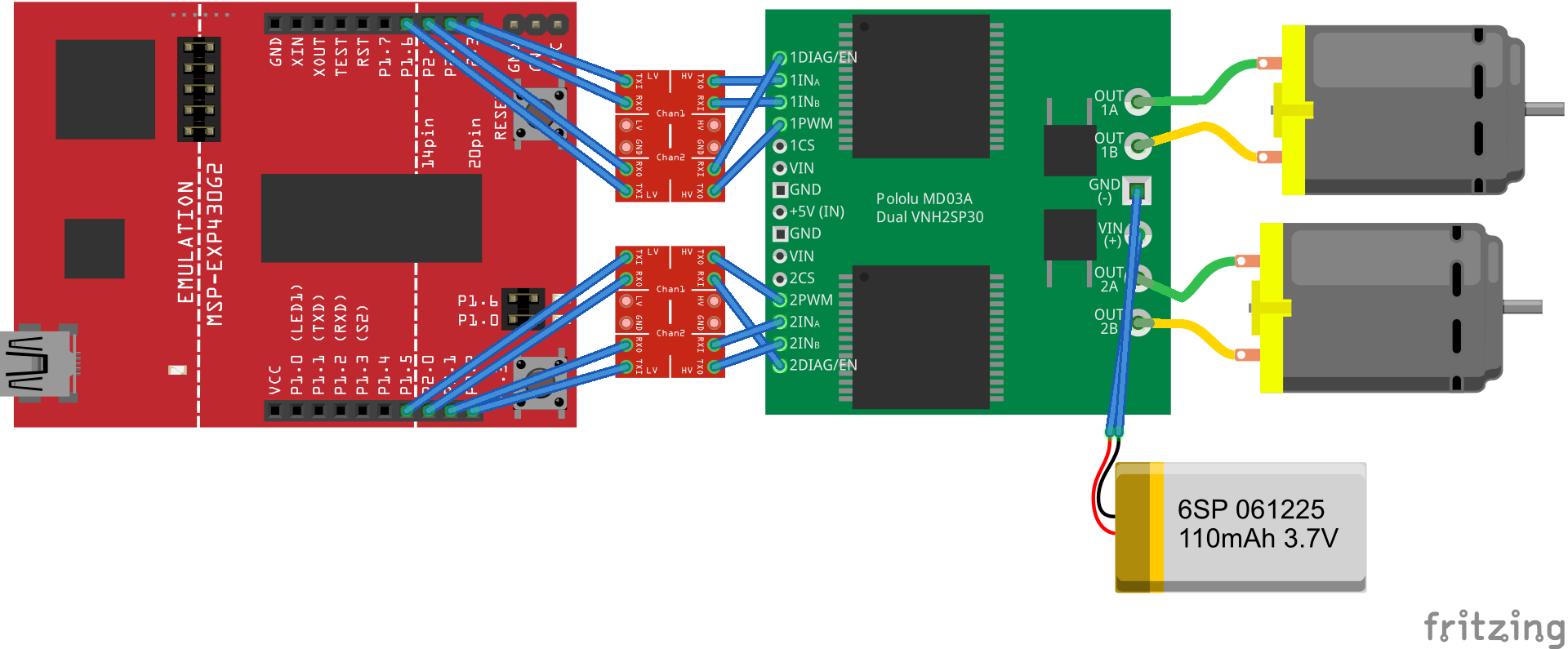
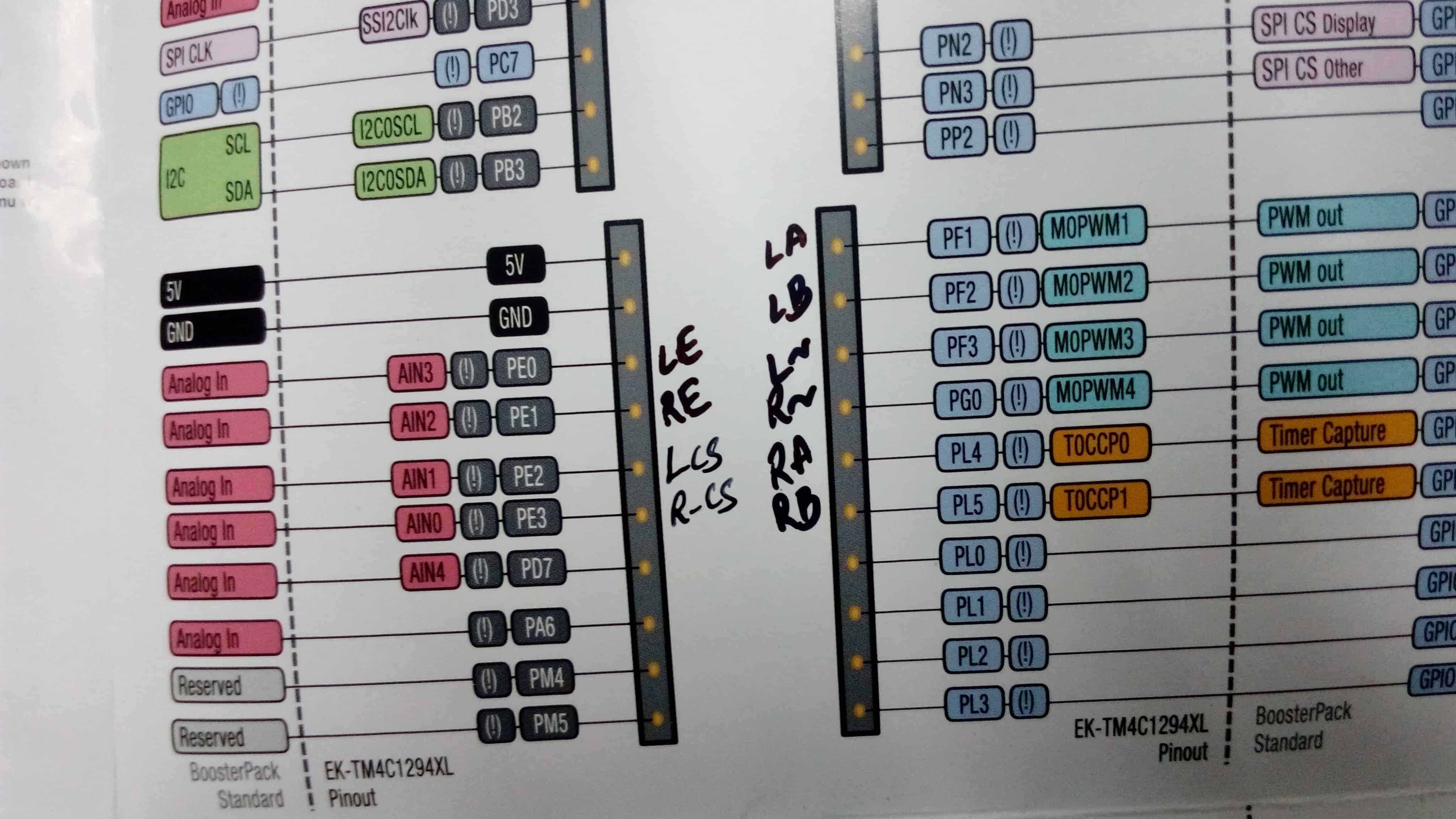
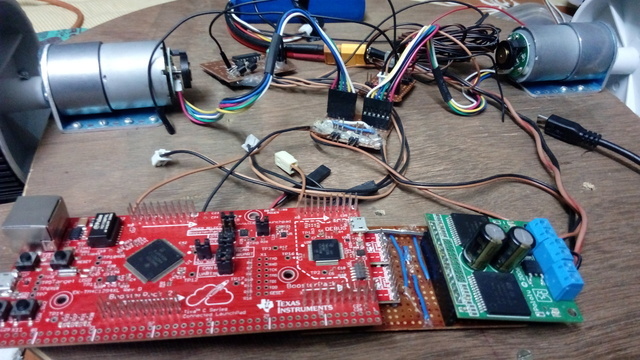
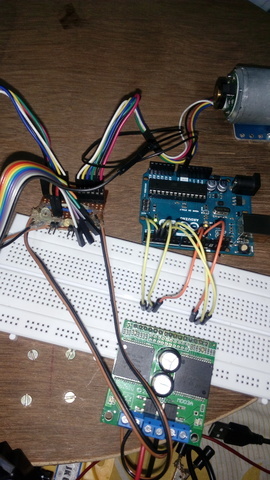
I am trying to run two Pololu 50:1 Motors (https://www.pololu.com/product/1444) with the VNH2SP30 Motor Driver (https://www.pololu.com/product/708/blog) using the Tiva T4MC1294 Connected Launchpad. I have also tried with Arduino UNO and have encountered the same set of problems in both boards.
The problems I am facing are:
[ul]1. Motors are not moving when I supply a PWM signal to the pwm pin of the motor driver using analogWrite() from the pwm compatible pins in arduino. In this case, I have supplied a HIGH voltage to the ENABLE Pin. The LED is flashing once when I give the Motor Signal to the A and B pins. There is a slight jerk of the motor but it does not move anymore.[/ul]
[ul]2. Motors are working when I supply a PWM signal to the ENABLE pin of the motor driver while I have supplied HIGH(5V) to the PWM pin. However, in this case, only one of the motor’s speed is changing with the PWM while the other motor is moving with constant speed. The LEDs are indicating as it should.
[/ul]
[ul]The range of speed variation of the motors with PWM supplied is very poor. The motor which is showing variation in speed is not showing uniformly. I have constantly decreased the duty cycle of the PWM in intervals of 5 seconds. The motor’s speed remains constant initially then it suddenly slows down and comes to a rest even when the duty cycle is above 15%.[/ul]
I do not have access to an oscilloscope so I can’t check the PWM but I used a multimeter to check the voltages and current draw of the motors. The voltage used to run the motors is 11.5v (from LiPo battery) and current draw is about 1.5A.
IMPORTANT UPDATE!!:
I supplied signal to the INA1 and INA2 pins from the microcontroller instead of wireless and it started working. Previously, the battery of my wireless was running low that is why the motors were not moving.
But still, I haven’t been able to control the speed of the motors yet although I am supplying a PWM in the PWM pins and high and low signals in INA and INB respectively. I also found that the motors are moving even when the ENABLE pins are low, contrary to what the datasheet says. The motors are moving only with INA and INB signals only. It does not take into account the signals at ENABLE and PWM pins.