Did anyone test what how many of the VL53L0X sensors you can run on the same I2C bus?
I only manage to get 4 running reliably using an Arduino Nano v3. ( there’s potential for 5 sensors, even 6 detected but it’s super unreliable - seems to freeze the bus)
The code is 100% based on your GitHub library.
Now, I use for this test a pair (4 units) of the ST Satellite boards. My Pololu units are yet to arrive.
Any ideas?
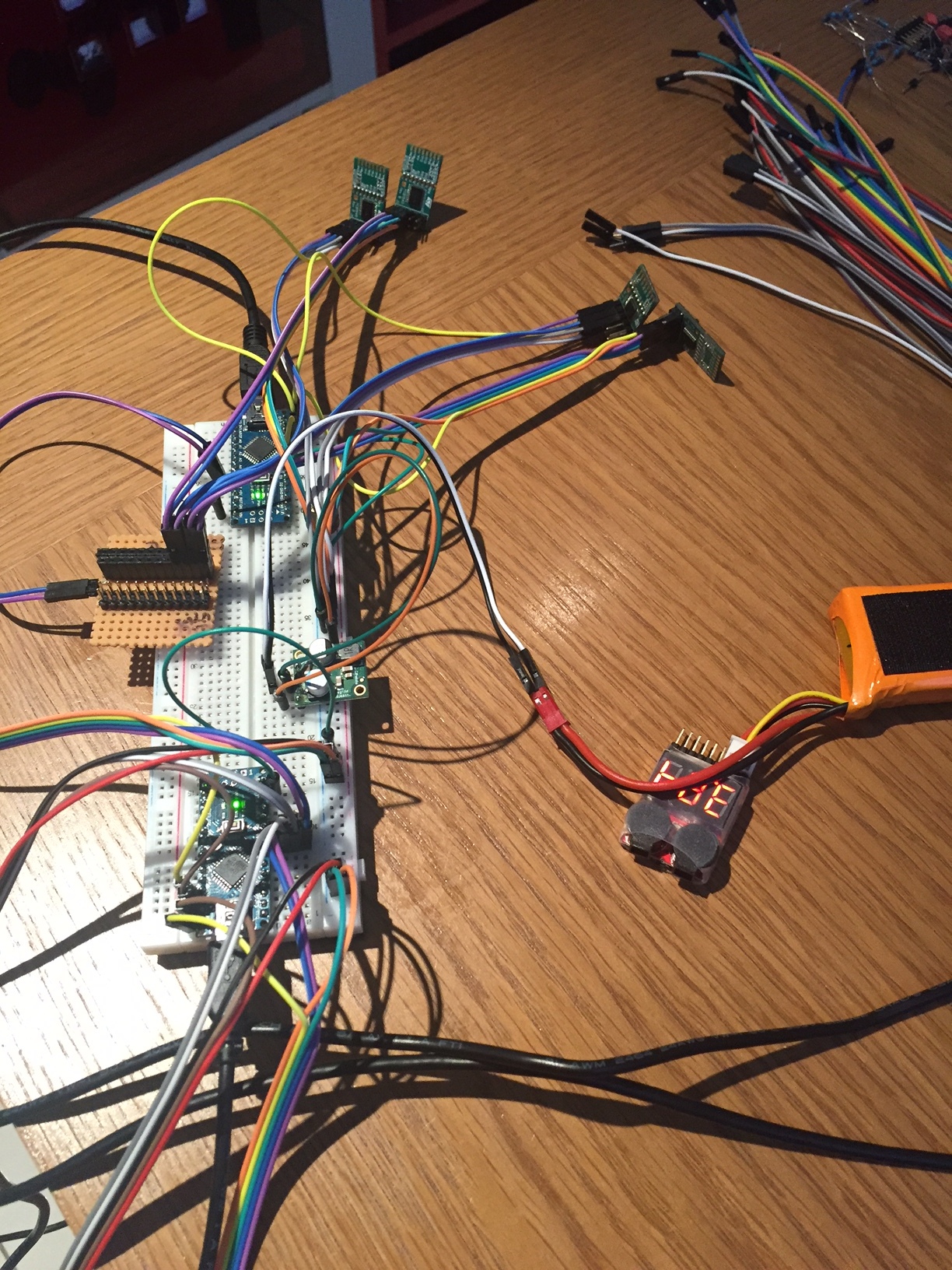
I’ve tried pretty much everything but my conclusion is I am at the limit of the bus capacitance. I can’t add any other I2C sensors and sometimes I can trip the bus by simply adding a pair of headers and touching them.
The horrible bench setup I use is in this picture - it’s that horrible on purpose-ish btw - I’m also testing the limit of system stability - I think I reached that one.
Any ideas welcome - more tests can be done, but I got to the limit of my imagination for this issue.
Thanks for the details about your setup. As you might have seen from the GitHub issue you posted on, there seems to be something different between the Pololu VL53L0X boards and the ST satellite boards, so it would be interesting to see if our boards work in your setup.
The level shifters in the satellite boards are supposed to have built-in pull-up resistors, but I don’t know how well those work. It’s hard to tell from your pictures, but do you have any external pull-ups on the I2C signals? If not, could you try adding some to see if they make any difference? 4.7k or 10k might be good values to start with; if you have an oscilloscope, that could be useful to see what effect they have.
Thank you for the help and hints.
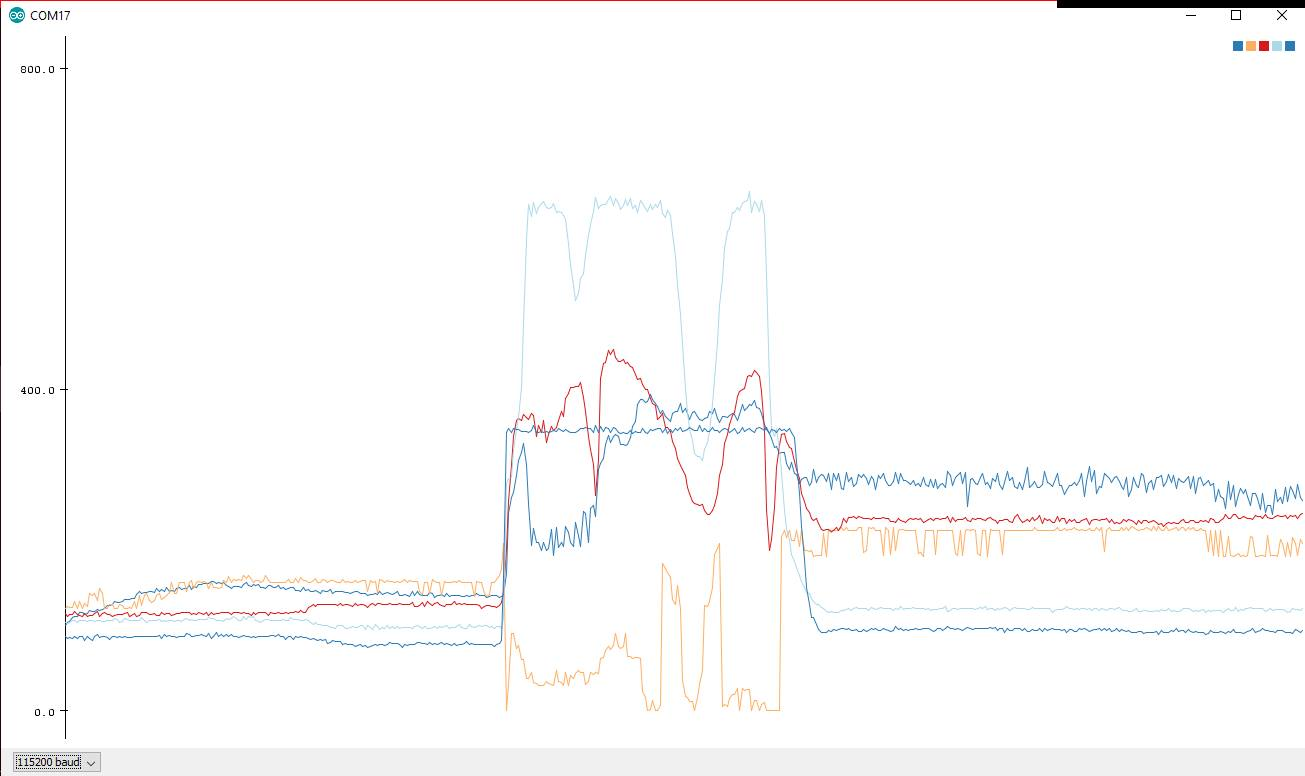
There was no code freeze, rather a bus freeze - the bus would stop working. This needed a sensor reset to fix it - a simple micro reset would not work.
Got the Pololu units last night - 8 sensors working on the bus, no delays in code and some “even more horrible” wiring - long cables, breadbard to breadboard etc.
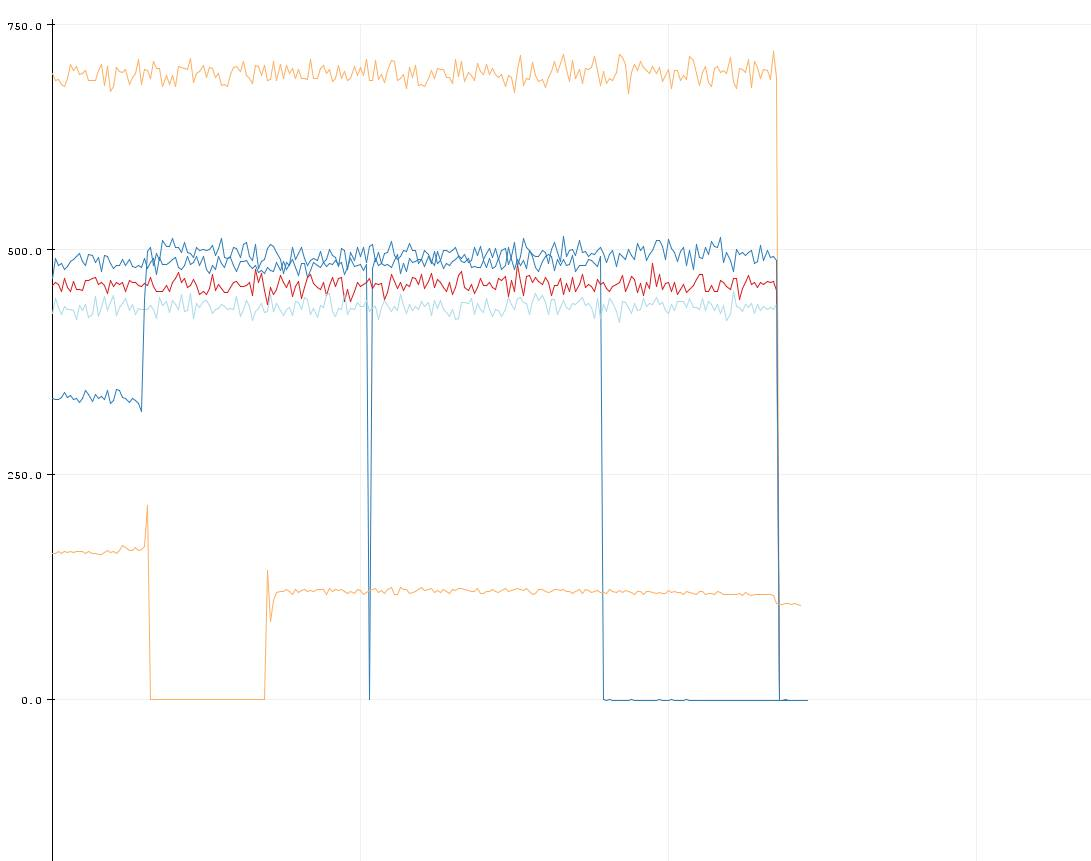
It runs very very well and stable. I am now testing long term stability, noise and bus freeze issues. Will be running the setup for a few hours today and checking/logging.
Seems all boils down to the level shifters ST used in the Satellite boards. Once those are out of the equation all runs very smooth.
As pullup resistors I tried 1k, 2k, 4k7 - all seems to work well.
My only issue with the boards is the fact that not all pins are level shifted (Especially the XSHUT, which is always driven when 2 sensors are needed). I know they should work even without this but for peace of mind it would have been ideal to protect all the pins
Overall the performance seems fine. Will update if I come across any strange behaviour.
Good to hear you got it working with our boards. We’d be interested to hear what you find out from your continued testing.
By the way, our carrier boards have onboard pull-up resistors, so you shouldn’t need external pull-ups, though adding them shouldn’t be a problem either.
I change the address via Github library, in order to have a unique address from these sensors and I have no Idea, why the address changes back after power cut off
Here is my ArduinoCode I used with ProMini and Nano
I could have saved my time by reading this earlier, which should be highlighted I suppose: The sensor’s 7-bit slave address defaults to 0101001b on power-up. It can be changed to any other value by writing one of the device configuration registers, but the new address only applies until the sensor is reset or powered off.
I suggest to add this white paper also to the product page
#include <Wire.h>
#include <VL53L0X.h>
//#define XSHUT_pin6 not required for address change
#define XSHUT_pin5 9
#define XSHUT_pin4 8
#define XSHUT_pin3 7
#define XSHUT_pin2 6
#define XSHUT_pin1 5
//ADDRESS_DEFAULT 0b0101001 or 41
//#define Sensor1_newAddress 41 not required address change
#define Sensor2_newAddress 42
#define Sensor3_newAddress 43
#define Sensor4_newAddress 44
#define Sensor5_newAddress 45
#define Sensor6_newAddress 46
VL53L0X Sensor1;
VL53L0X Sensor2;
VL53L0X Sensor3;
VL53L0X Sensor4;
VL53L0X Sensor5;
VL53L0X Sensor6;
void setup()
{ /*WARNING*/
//Shutdown pins of VL53L0X ACTIVE-LOW-ONLY NO TOLERANT TO 5V will fry them
pinMode(XSHUT_pin1, OUTPUT);
pinMode(XSHUT_pin2, OUTPUT);
pinMode(XSHUT_pin3, OUTPUT);
pinMode(XSHUT_pin4, OUTPUT);
pinMode(XSHUT_pin5, OUTPUT);
Serial.begin(9600);
Wire.begin();
//Change address of sensor and power up next one
Sensor6.setAddress(Sensor6_newAddress);
pinMode(XSHUT_pin5, INPUT);
delay(10); //For power-up procedure t-boot max 1.2ms "Datasheet: 2.9 Power sequence"
Sensor5.setAddress(Sensor5_newAddress);
pinMode(XSHUT_pin4, INPUT);
delay(10);
Sensor4.setAddress(Sensor4_newAddress);
pinMode(XSHUT_pin3, INPUT);
delay(10);
Sensor3.setAddress(Sensor3_newAddress);
pinMode(XSHUT_pin2, INPUT);
delay(10);
Sensor2.setAddress(Sensor2_newAddress);
pinMode(XSHUT_pin1, INPUT);
delay(10);
Sensor1.init();
Sensor2.init();
Sensor3.init();
Sensor4.init();
Sensor5.init();
Sensor6.init();
Sensor1.setTimeout(500);
Sensor2.setTimeout(500);
Sensor3.setTimeout(500);
Sensor4.setTimeout(500);
Sensor5.setTimeout(500);
Sensor6.setTimeout(500);
// Start continuous back-to-back mode (take readings as
// fast as possible). To use continuous timed mode
// instead, provide a desired inter-measurement period in
// ms (e.g. sensor.startContinuous(100)).
Sensor1.startContinuous();
Sensor2.startContinuous();
Sensor3.startContinuous();
Sensor4.startContinuous();
Sensor5.startContinuous();
Sensor6.startContinuous();
}
void loop()
{
Serial.print(Sensor1.readRangeContinuousMillimeters());
Serial.print(',');
Serial.print(Sensor2.readRangeContinuousMillimeters());
Serial.print(',');
//Serial.print(Sensor3.readRangeContinuousMillimeters());
//Serial.print(','); Did not work for me result was 65535
Serial.print(Sensor4.readRangeContinuousMillimeters());
Serial.print(',');
Serial.print(Sensor5.readRangeContinuousMillimeters());
Serial.print(',');
Serial.print(Sensor6.readRangeContinuousMillimeters());
Serial.println();
}
I have identified that one of my sensors does not respond after soldering I2C Lines
Don’t know what to do with it. Probably trash it.
There is a link to ST’s documentation for the sensor (which includes that whitepaper) on the “Resources” tab of the sensor’s product page, but to make it easier to find, we added a direct link to the whitepaper there as well.
If you contact us via email about the sensor that is not responding, we will see what we can do to help you out. Please include pictures of the connections to the board as well as your sales order information.
I ordered them from Botland (Poland), all working except the one, where I soldered an array of wires one hole further, which has destroyed it. So 11/12 should be operational.
And yesterdays problem is just a dust between XSHUT1…5 connector, all of them work today.
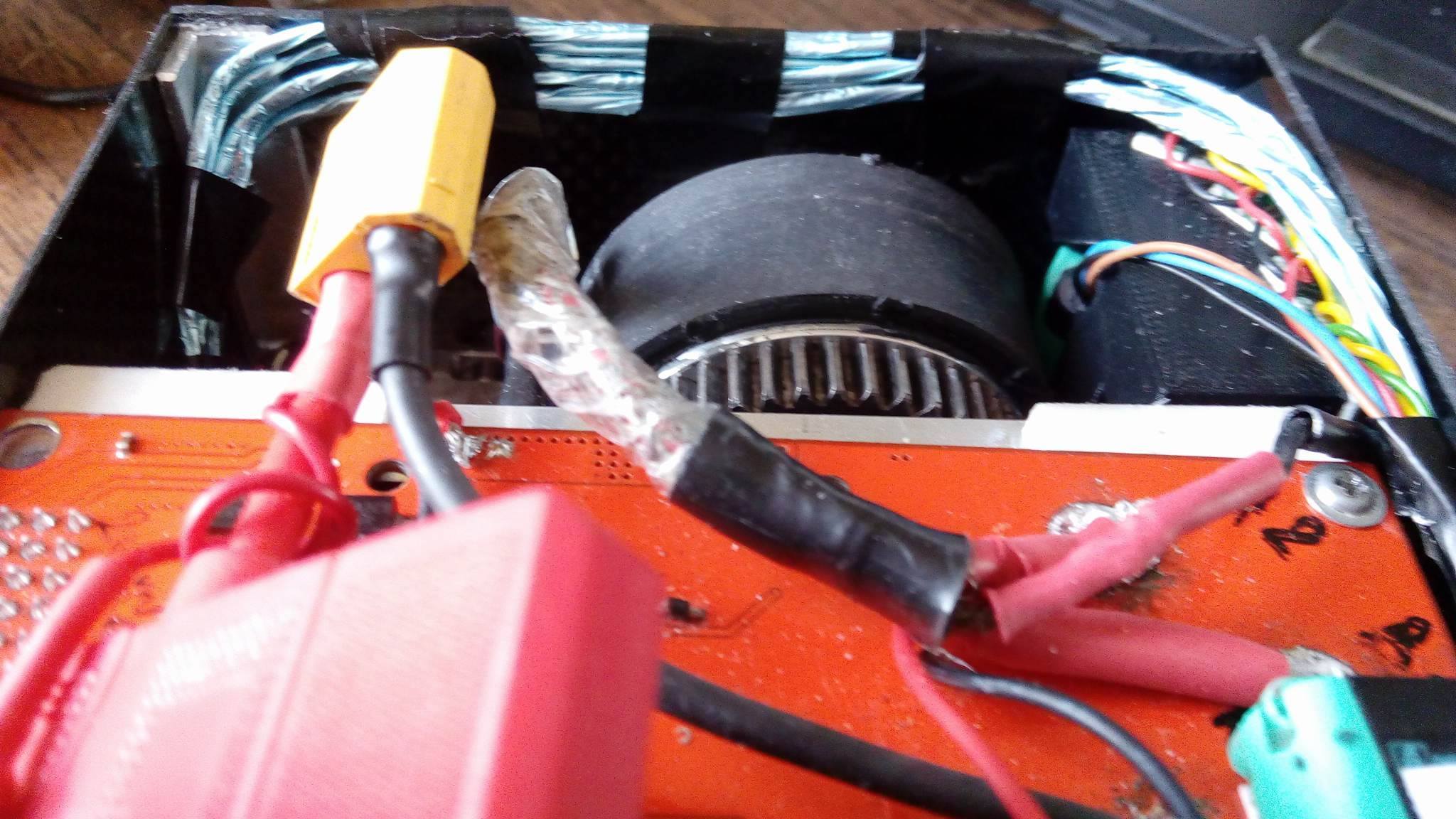
That sounds like a complicated problem and it is not easy for me to troubleshoot with the limited information I have about your system, but I can recommend a few things to check. It is possible that the behavior you described could be caused by a brownout, which is a drooping of the supply voltage as large amounts of current are drawn briefly. You might consider adding some electrolytic capacitors across the sensor power rails to ensure they have a clean power supply. You might also check to be sure your signal wires are not in close proximity to the high current wires for the motors.
If your motors and the sensors are run from the same controller, you might try putting together a simplified test program to test whether a single motor and sensor (using the XSHUT pin) operate at the same time and gradually making the system more complicated again until it fails.
There was brownout long before this question, as ION motion controller HV 2x60A 's BEC is only 200mA max draw…
But the XSHUTs with hardly any oscilloscope detection.I seen some pikes +/- 1V, so I assumed that induction from motor current is triggering the sensors to shutdown
I have solved the problem by pushing wires away from the motor wires.
Each XSHUT is connected by separate shielded wire with proper grounding at each point of destination
When you used your addressing code I assume you used the Pololu breakouts. However, I am doing a small project and am waiting on my order to arrive. I am using the ST manufactured satellite boards and have no luck reading any data using even example code. Do you have a github with your addressing code and general pin to pin connection for the satellites? I am assuming once I get the pololu boards this process will simplify with the rest of the resources found inside this thread.
Hello,
I used the pololu code from these examples and all went well. Be careful of pullup values and wiring setup - the level shifters on these boards are quite “delicate” - not that they will break but they will stop working and take the bus down. We didn’t use the git but everything is standard on these boards - they don’t need any special layout. Hope this helps
There is a recently published Hackaday article that has a lot of good information about pullup resistor values, using I2C devices over longer wires, and in noisy environments:
1 : Xshout is tolerant to atmel atmega 328p gpio ?
2 : Cover window material can be made of glass or plastic !
i need some concrete types of this materials and ir filter materials (only plastic, no glass)