
I’m working on a project to connect motors Faulhaber 1512 SR IE2-8 to the Roboclaw 2x7A, that is connected to an Arduino Mega2560. I have everything connected correctly and when I control the motors through BasicMicro Motion Studio in PWM settings, the motors go forward and backwards accordingly, but when I use one of the codes from the Roboclaw library on the arduino, it doesn’t do anything. Any ideia on where the problem is or how to fix it?
Hello.
I moved your post to a more appropriate section of the forum.
Could you post some pictures of your setup that show all of your connections? Which specific examples from the RoboClaw Arduino library are you using?
Brandon
Hi,
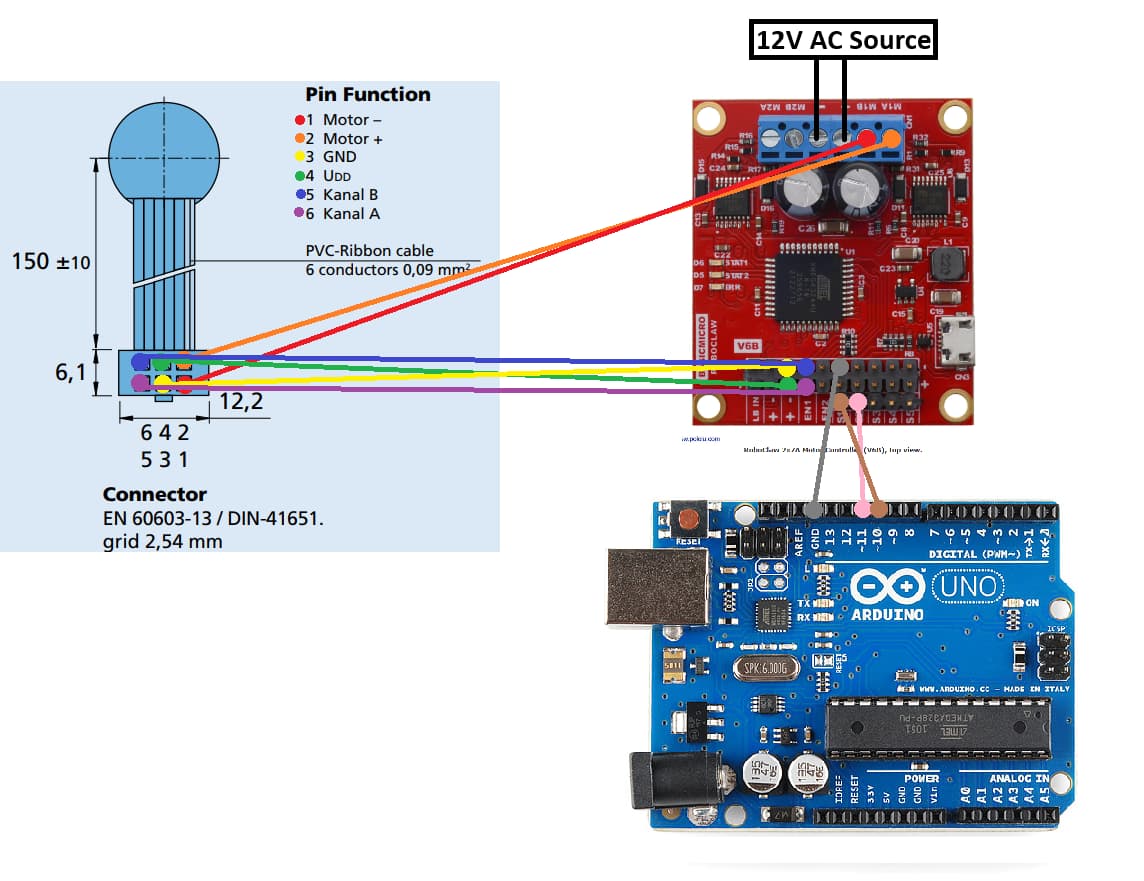
So, in the attached image are the circuit connections I did, with one motor and only one Roboclaw so far, since i’m only testing out the controls:
I’m using as a reference the following post to build: Using Multiple RoboClaws with Arduino - Basicmicro, but without the Adafruit Proto-Screwshield.
And i’m using the PacketSerialSimplePWM.ino as testing code: roboclaw_arduino_library/examples/PacketSerialSimplePWM/PacketSerialSimplePWM.ino at master · basicmicro/roboclaw_arduino_library · GitHub .
Could you post more information about your power supply? Is it really an AC supply as indicated in your diagram?
Also, it looks like your diagram is showing the TX and RX connections swapped. Pin 11 on the Arduino is acting as TX and should be connected to S1, and pin 10 is acting as RX and should connect to S2. I recommend making sure your physical connections are correct and checking that your RoboClaw is configured for Packet Serial mode and the same baudrate specified in the code (38400).
Brandon
Hii,
It’s just an 12V power supply that I connected to an outlet. But I just corrected the inverted Rx/Tx that you mentioned, and it worked!!
Thank you so much, really!!
Celina.
2 Likes