I have a 2DOF motion sim that used JRK12v12 that had firmware version 1.4 to run the 2 motors. One of these boards died, so i purchased 2 new 12v12 boards and they had firmware 1.3. I swapped these in to the 2DOF sim and it was all working fine.
Over the weekend i built another part of the sim to make it a 3DOF motion sim, and installed another motor using the remaining (still working) original 12v12 with with firmware 1.4.
Now all of the motors appear to just cycle in and out of use when i try and configure them using the utility software. When i ‘turn on the motor’ to test its motion, they only work for 2-3 seconds and then stop working. It is the ‘awaiting command’ on the error page that shows errors for a period of seconds, then it stops and pauses for a few seconds, then goes up again (and so on and on etc). Even if unplug all the motors and controllers, and only connect up 1 at a time, they still dont work.
By plugging in 2 versions of the firmware have i corrupted something?
Do all of the 12v12 controllers have to be on the same firmware versions?
Can i update the new 12v12 controllers to firmware version 1.4 to match the others?
As I mentioned in your other thread, the only difference between the 1.3 and 1.4 firmware is the way the motor brakes. You can find more information about this in the note at the top of the “Upgrading Firmware” section of the Jrk user’s guide, but ultimately since that difference only affects how a parameter is handled internally, connecting boards with the two different firmware versions at the same time should not have caused any issues. It is up to you if you want to upgrade them all to the version 1.4 firmware so they all match, but I recommend trying to troubleshoot and get your boards in a working state first before introducing more variables like that.
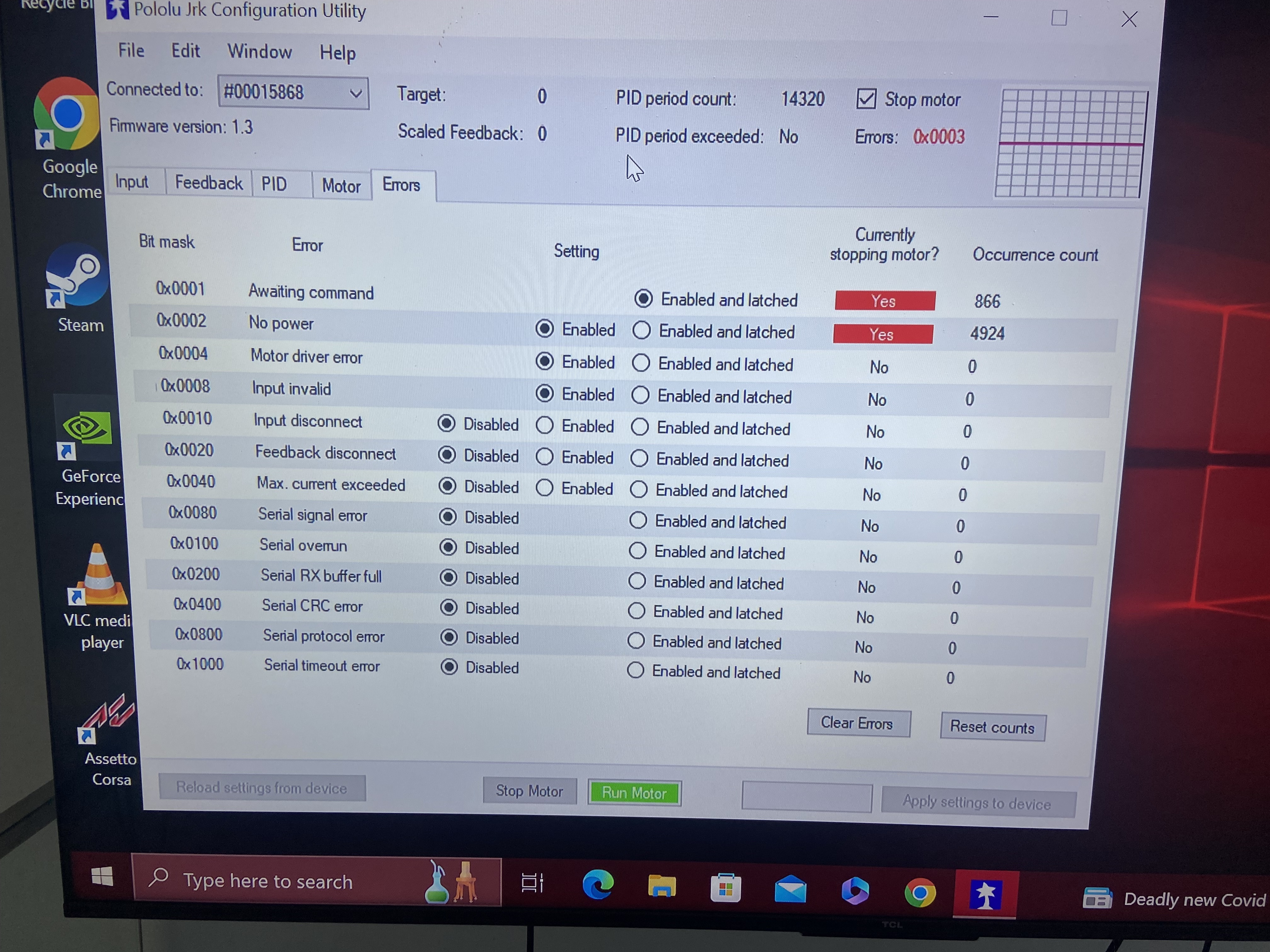
The “Awaiting Command” error is triggered whenever a different error that is configured to latch happens. Could you check the “Occurrence count” column in the “Errors” tab of the Jrk Configuration Utility to see if any other errors are causing it? A screenshot of that tab would be helpful as well.
Additionally, with only one Jrk connected, could you try disconnecting your motor and seeing if it still behaves the same way?
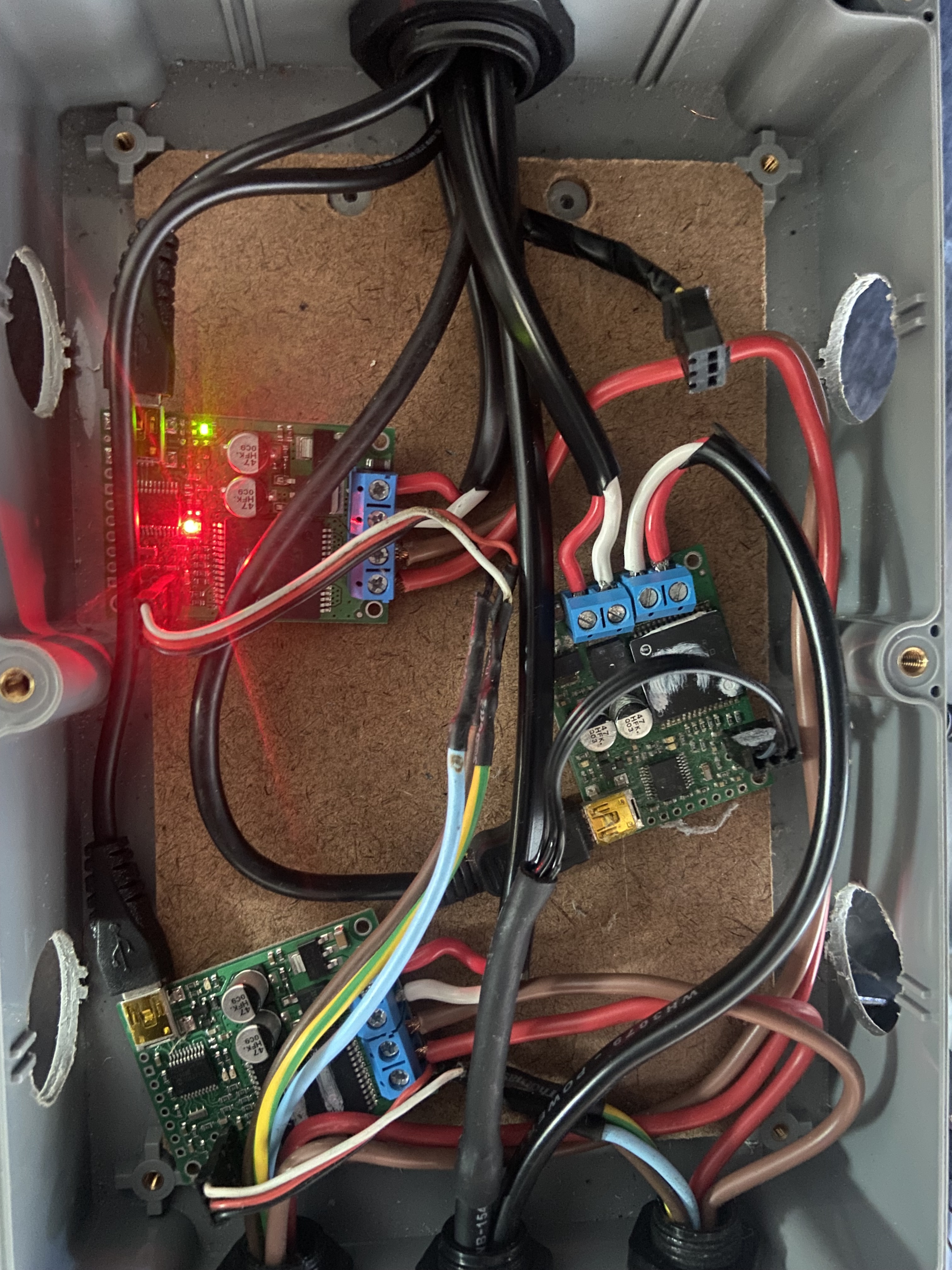
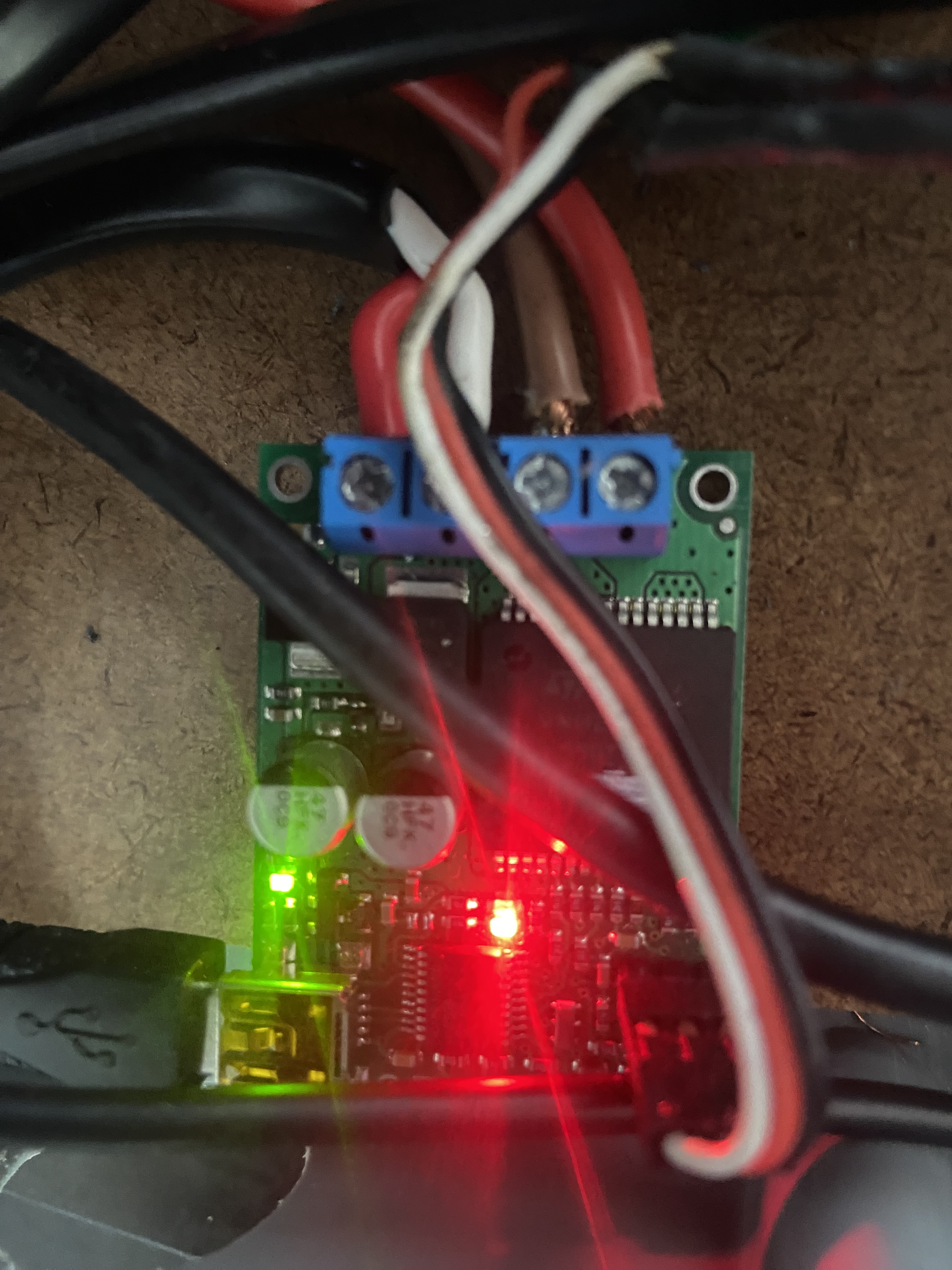
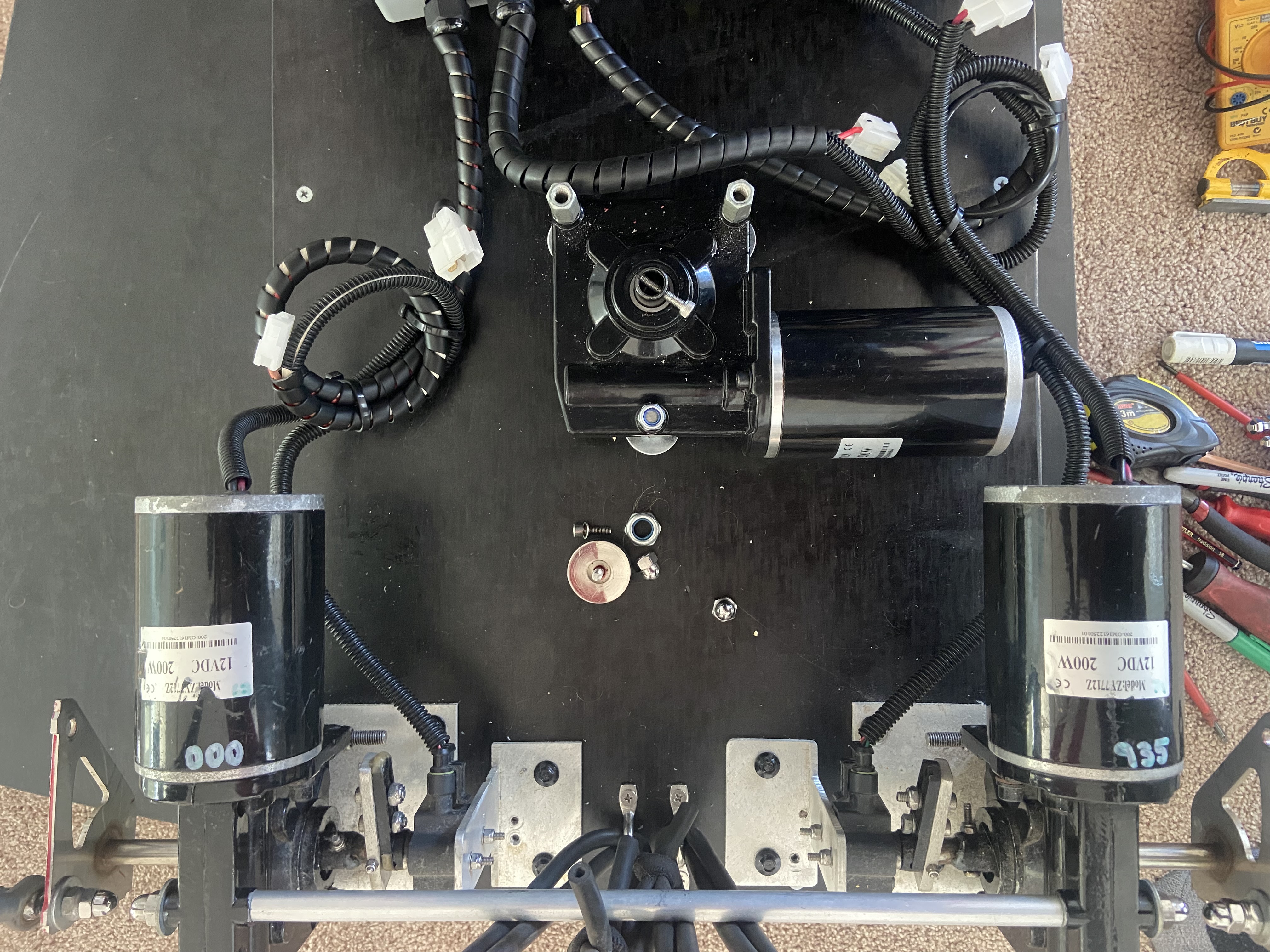
Also, could you post some pictures of your current setup that show all of your connections?
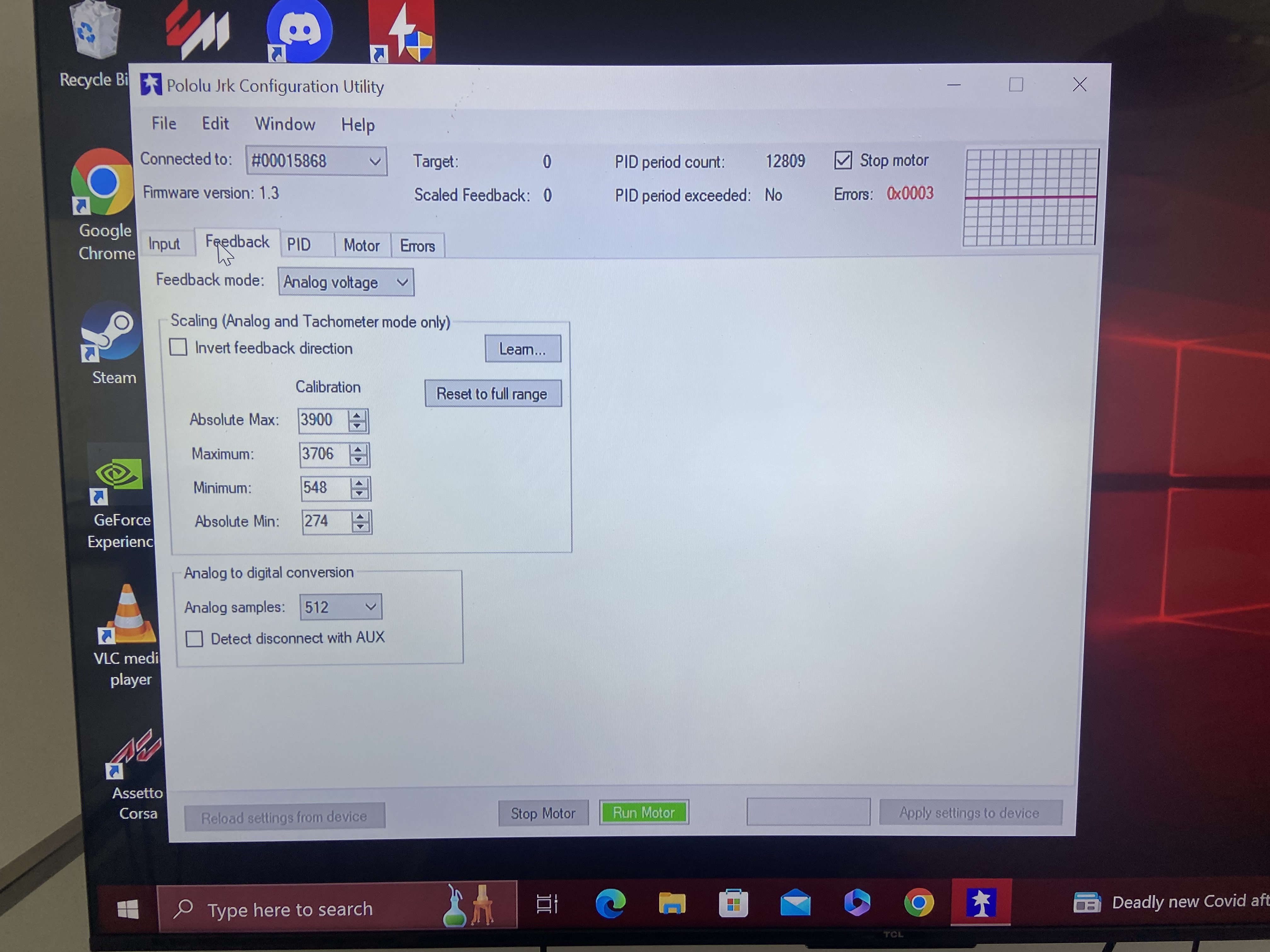
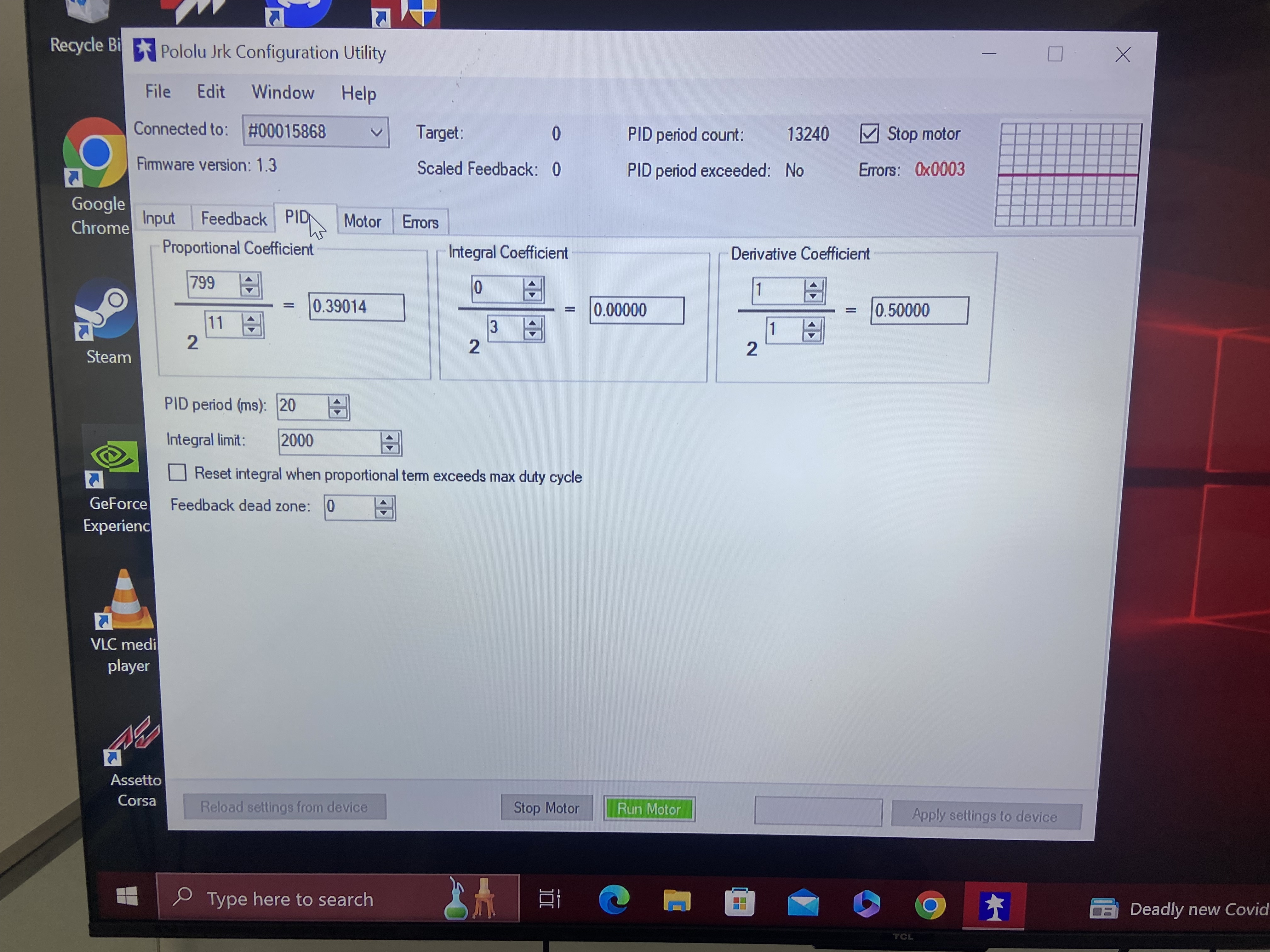
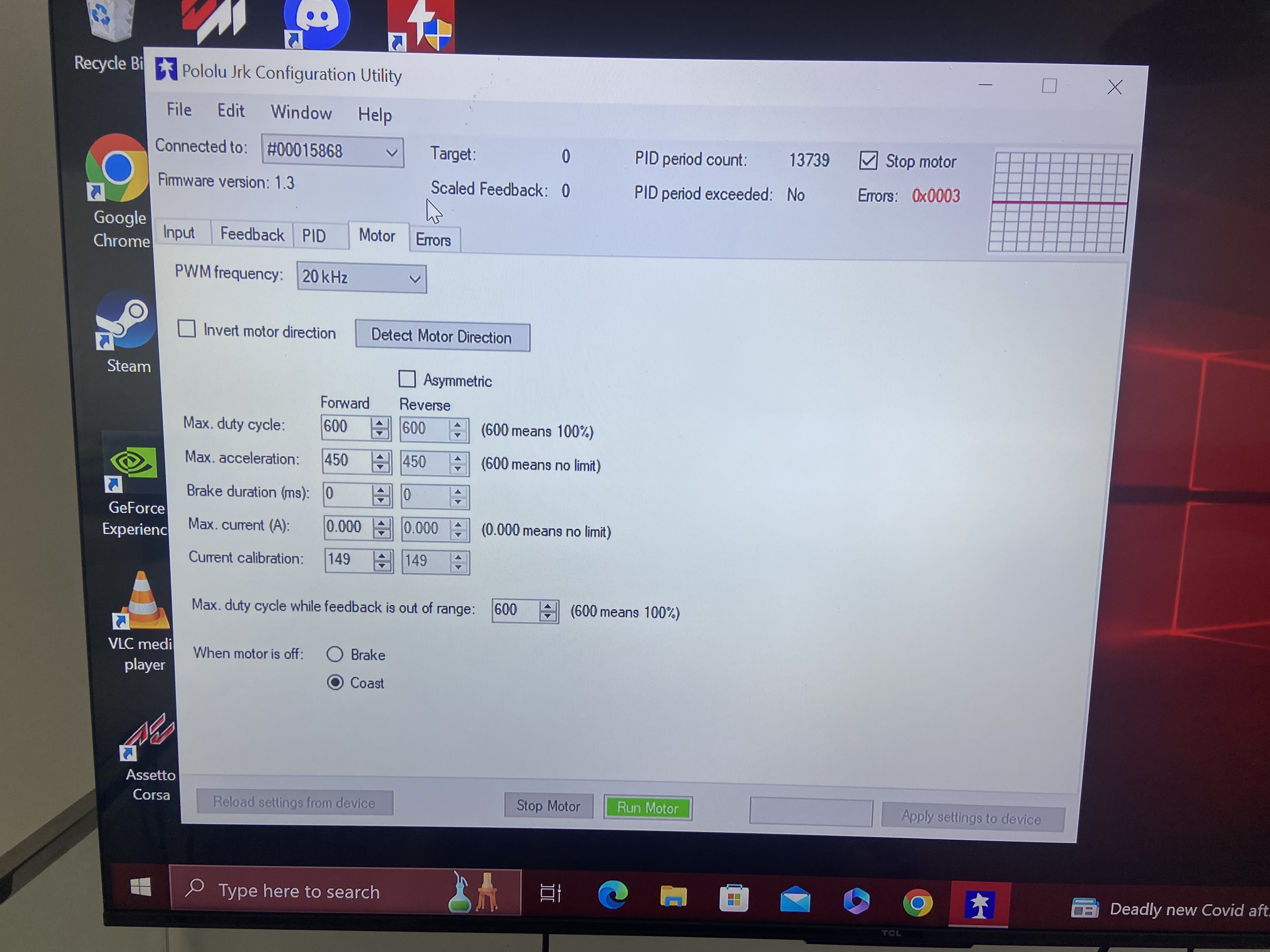
Here are some photos of the setup and the screen shots of the Utility.
Just to clarify, these shots were taken with only 1 JKR connected, and no power to the motor. The other 2 boards were not plugged in to the PC and the motors were disconnected.
The ‘awaiting command’ error ticks over to about 60, then pauses for about about 3-4 seconds. Then it continues to tick over for another 60ish (to about 120 errors), and pauses again (and so on and on).
The ‘No power’ error does not occur when I turn the power on to the board and motor.
It just seams very odd when the 2 motors worked fine, but when I added the 3rd motor it stopped working. And now none work even when I go back to the setup I originally had???
The “Awaiting command” error should trigger for the following reasons:
If another error that is configured as “Enabled and Latched” gets reported (which isn’t the cause since none of your other errors are configured to latch).
When the Jrk is starting up, with the input mode set to Serial
When the Jrk receives a “Motor off” command, or a “Set Target Low Resolution Reverse” command with value 0.
So, the error triggering in the 60-second interval you described is suspicious; especially so if it is happening to all 3 of your Jrk controllers. Is your motion simulator software running (or any other program/software connected to the Jrk controller aside from the Jrk Configuration Utility)? If you haven’t done so already you might try restarting your computer and only launching the Jrk Configuration Utility. You could also try connecting it to a different computer.
So I think you solved the problem. When you said try a different computer, it made me go back over all of the other. Programs that may be open in the background.
What I found is that my racing wheel management program (MOZA Pithouse) was open in the background. This has been the case since I got it months ago, and never been an issue.
But It has regular updates to the software, and I suspect that something in an update is now doing something to the Utility software when trying to setup the JKR boards. As soon as I turned the MOZA software off, it all worked fine again.
I also checked the motion platform when the main sim software runs the JKR boards and motors with the MOZA Software running as well (as it’s needed for the wheel, pedals etc). And it all works fine as it should.
So it must just be some conflict with the Utility software. Which is ok, because I only ever need this to setup, and there is no need for the other stuff at that time.
Thank you for all the help, your questions made me find the solution. I’m sure someone who had this infront of them and understood computers better than me would have figured this out quicker than I did. At least I didn’t break anything.
Time to put all the hardware back together properly and get racing!!!