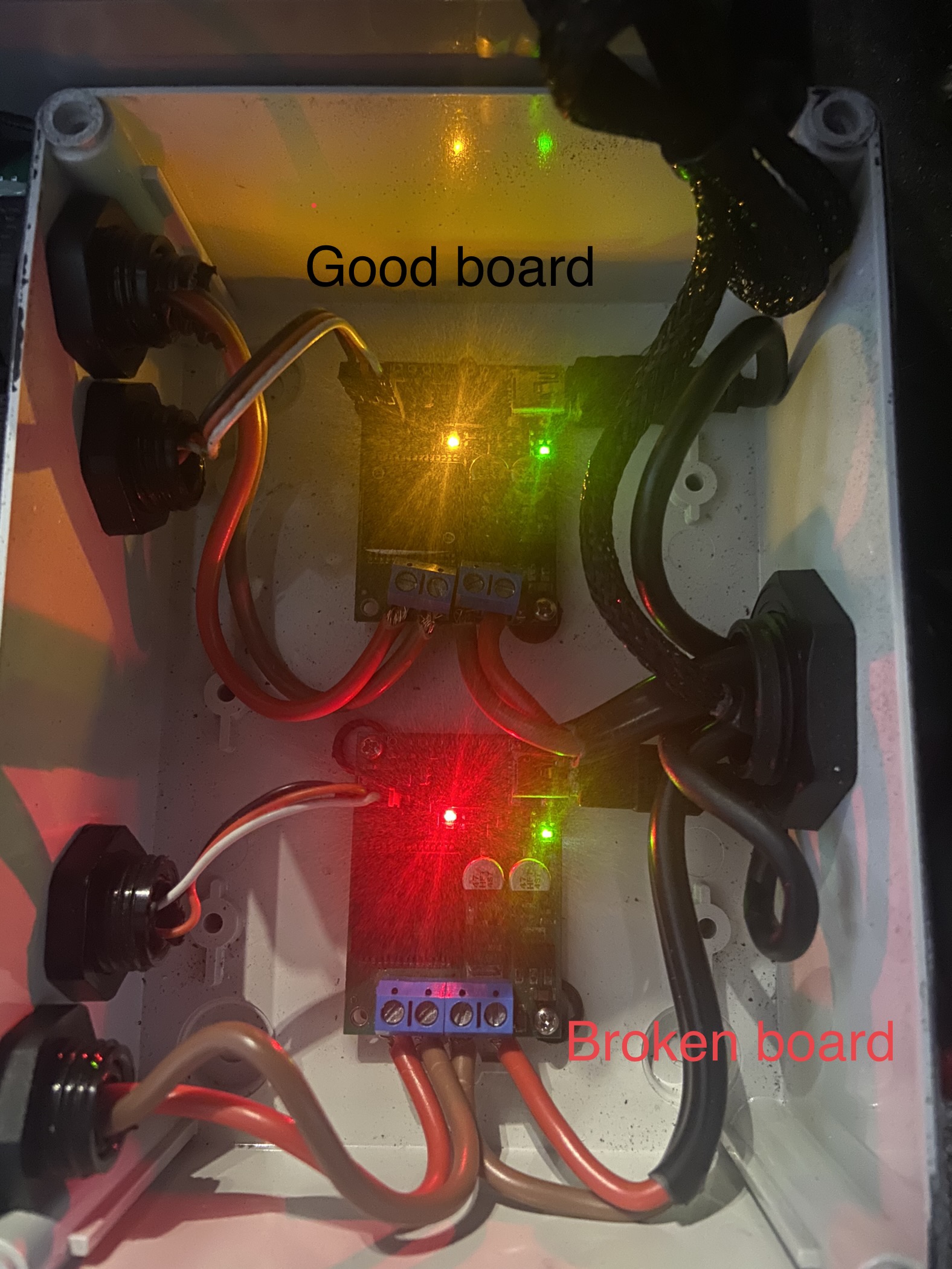
Hi all, I’m new to control electronics and learning as I go. I have a racing motion simulator I have built and used 1/2 built stuff from someone else. It was all working great, but I now have a power error on one of the JRK 12v12 boards. I have switched the boards over, and the other board works perfectly where the broken board was located (so not wiring or motors etc).
I have also checked that 12v is being supplied to the board, and it is. This makes me think that it is something in the board.
Any advice / help on how to maybe fix it without having to buy a new board would be great. Fallback option is to just replace the board. But I think I need one that matches a 2009 version (I read somewhere the boards after 2012 use different software?).
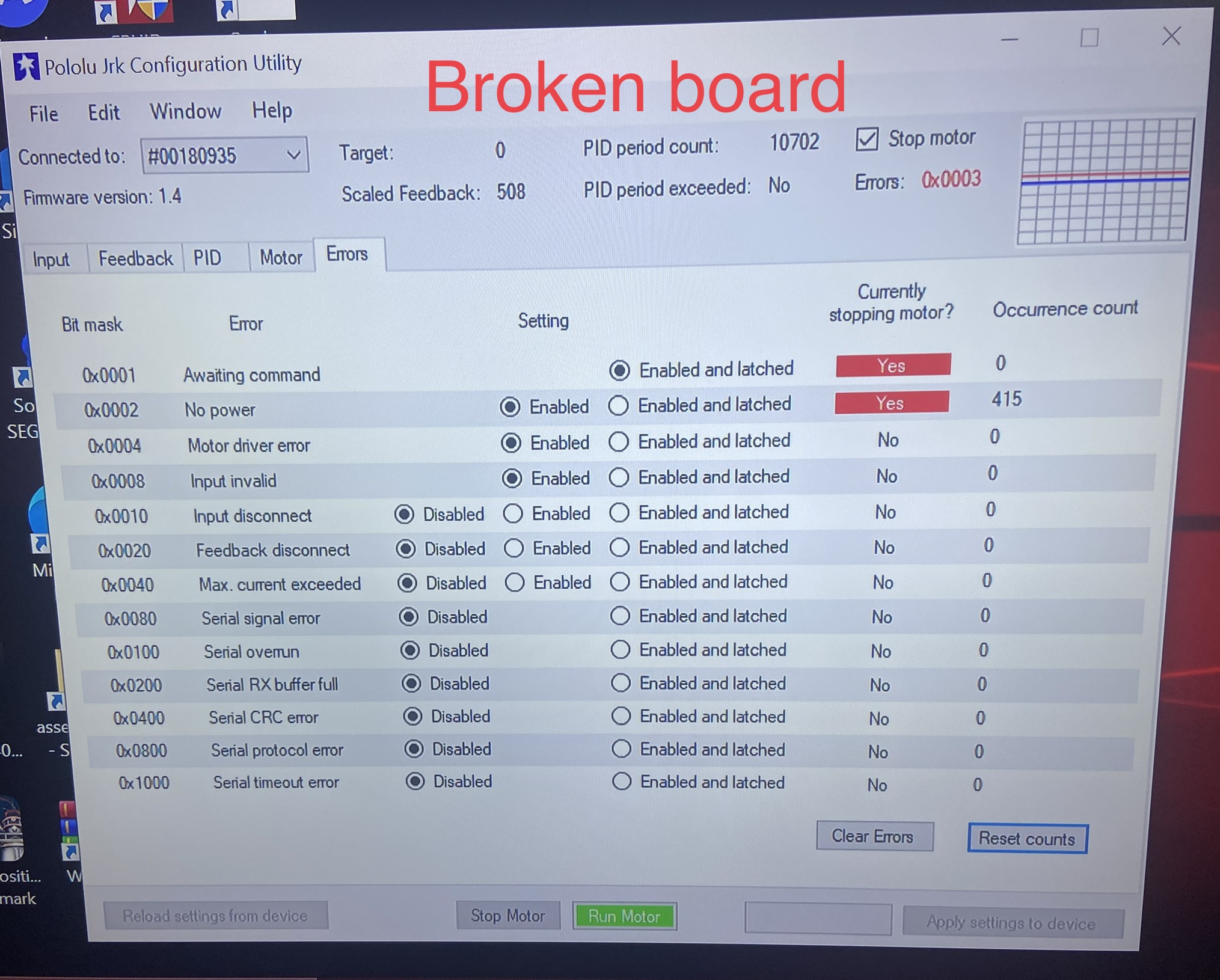
Here are some photos of the board and error messages.
Could you try measuring the voltage at the VIN(out) pin and the +5V(out) pin with respect to ground while the board is powered only through the VIN terminal block (i.e. not USB)?
Please note that if you do want to go with a replacement, we currently still have some of the original Jrk 12v12 controllers available; however, please note that the motor driver IC has been discontinued and they are on end-of-life rationing. It sounds like you might be concerned about the firmware change that happened in 2012; you can find a note about that in the “Upgrading Firmware” section of the Jrk user’s guide. Is there something in particular about the 1.4 firmware that makes it incompatible with your system?
I have just measured the hood working and broken boards (as they are connected side by side and easy to compare).
The good board has 12v and 4.7v respectively.
The broken board has 12v and 4.15v respectively.
My reason for wanting the older model is purely based on replacing like with like. I have 2 boards connected to the same computer through 2 separate usb cables. I assume they would both need to have the same firmware to work the same way (I don’t know if this is true, I don’t really understand all this electronics stuff in detail). Please let me know if I am wrong.
I don’t understand what the Motor Driver IC does, but I assume that I need it connected and working if the other good board has it.
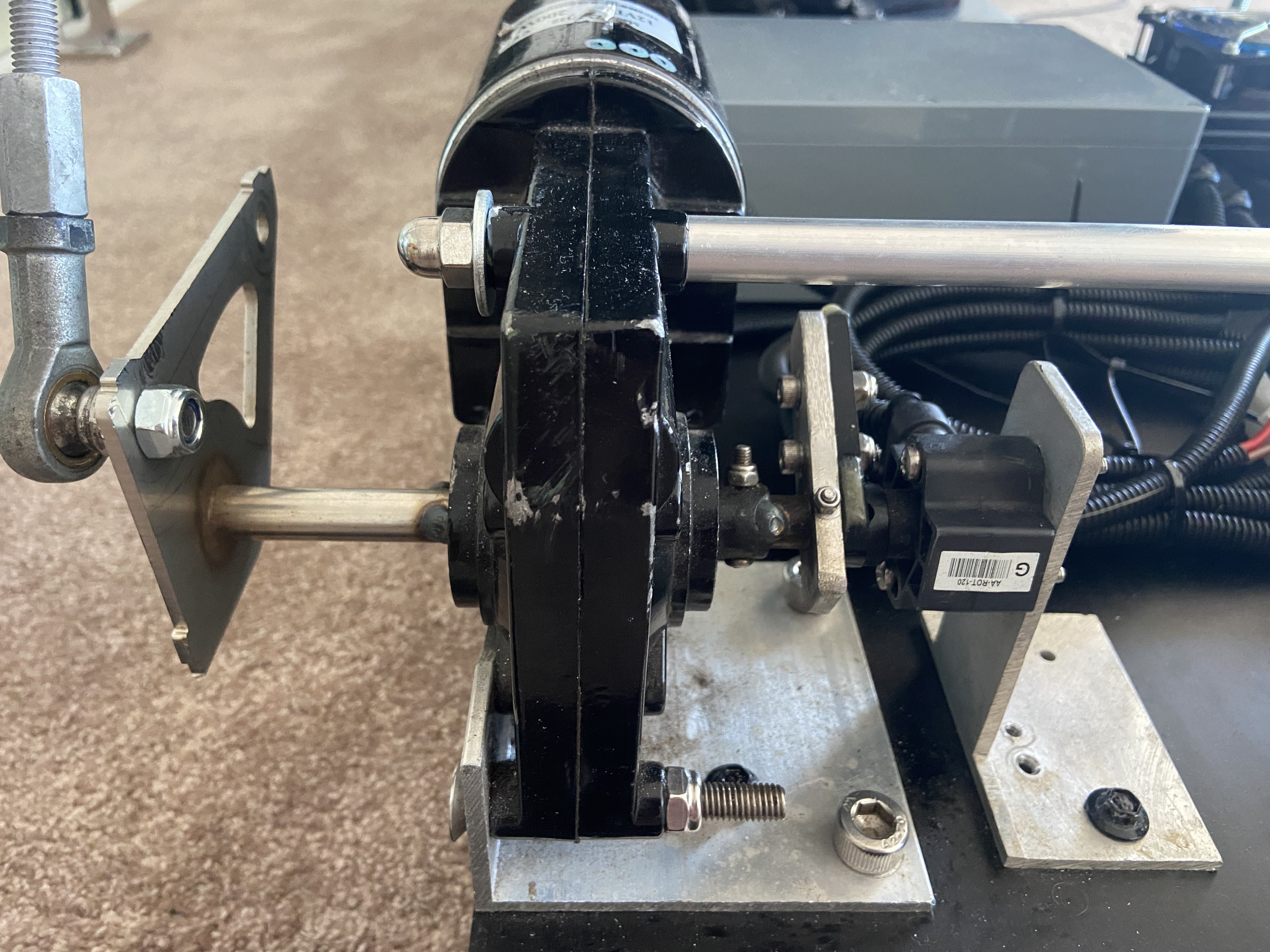
The boards are connected to 2 motors for the motion platform of my sim rig. Each motor has a sensor on it.
Unfortunately it is not clear what might have happened to your Jrk controller, but it does seem damaged and likely is not practical to fix.
As far as the firmware change, I generally expect the newer firmware to work fine in most applications that the previous firmware worked in. There are two main differences; one is that with the newer firmware the Jrk will always brake the motor when the commanded duty cycle is 0 (previously, it would coast if it was going in one direction and brake in the other). The second is that it will drive both motor terminals low instead of high while braking.
Can I run 1 old board on the old software version, and 1 new board on the new software? Will this all show up in the same program on the computer?
If I do run 2 different boards, will they react differently, hence it will make the sim feel unbalanced?
Do you have any of the old boards with everything connected? If not, and depending on the answers above, I might have to get 2 new boards so they match?
As I described previously, the only thing that changed in the firmware was how and when the motor brakes. You should be able to run it in the same system in terms of software compatibility. I am not familiar enough with the motion simulator software or the mechanical setup to confirm if it will feel different. Essentially, unless your simulator somehow relies on the asymmetric braking behavior in the old firmware or the setup somehow relies on the motors braking high, I suspect it will be fine.
We do not carry a version of the Jrk 12v12 controller with the through-hole components (terminal blocks and header pins) pre-installed, so you would have to solder them yourself.
If your main concern is making sure the two boards match (and not something specific about the old firmware), you could upgrade the firmware on your board to version 1.4 so it matches the replacement. You can find instructions for doing this in the “Upgrading Firmware” section of the Jrk user’s guide.