I took Ben’s feedback and improved the code. Please look at the comments in the code carefully. You will have to set the percentOutput value to meet the specifications of your motor.
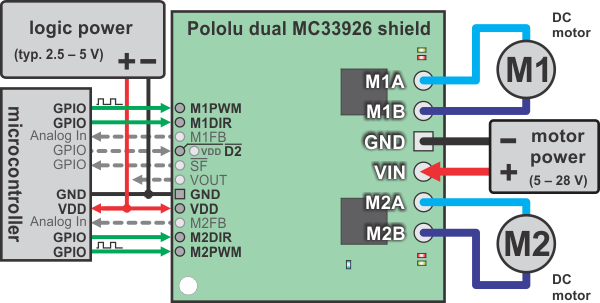
#include "DualMC33926MotorShield.h"
DualMC33926MotorShield md;
// If you want to use the VNH5019 Dual Motor Shield instead, comment out the two lines
// above and uncomment the two lines below.
// #include "DualVNH5019MotorShield.h"
// DualVNH5019MotorShield md;
// The constant below will scale the peak output voltage to the motor by the percentage
// declared. For example, if you want the peak voltage to the motor to be equal to VIN,
// set percentOutput to 100. If you want the peak voltage to the motor to be 80% of VIN,
// set percentOutput to 80. You should see what voltage the stepper motor is rated for
// and set percentOutput appropriately. The value of percentOutput should be between 0
// and 100.
const byte percentOutput = 50;
#define QUARTER_STEP 1
#define HALF_STEP 2
#define FULL_STEP 4
unsigned char stepMode = FULL_STEP;
// This function will set the voltage applied to each coil.
inline void set_speeds(int m1speed, int m2speed)
{
md.setSpeeds(m1speed/2*percentOutput/50, m2speed/2*percentOutput/50);
}
// Advances the stepper motor by one step either clockwise or counterclockwise
// with the direction specified by the argument dir (0 or 1). The size of the
// step depends on stepMode and can either be a full step, a half step, or a
// quarter step. Full stepping is produced by repeating a four-state cycle
// in which both coils are always energized to carry the same magnitude of current
// but the direction of the current is sequentially switched. Running through the
// four-state cycle in the reverse order reverses the direction of rotation. The
// general equation for coil current should be as follows:
// coil 1 current = I * sin(a)
// coil 2 current = I * cos(a)
// When full stepping, the four states are:
// forwards: a = 0, 90, 180, 270 degrees
// reverse: a = 0, 270, 180, 90 degrees
// half stepping comes from: a = 0, 45, 90, 135, 180, 225, 270, 315 degrees
// quarter stepping comes from a = the 16 multiples of 22.5 from 22.5 to 360 deg
void one_step(unsigned char dir)
{
// this static variable lets us remember what step we're on so we
// can change to the appropriate next state in the sequence
static unsigned char step = 0;
// compute the next step based on the direction argument dir
// and the step mode. Full stepping skips half and quarter steps,
// and half stepping skips quarter steps. Quarter stepping cycles
// through all 16 steps.
if (dir == 1)
step += stepMode;
else
step -= stepMode;
switch (step & 15)
{
case 0: // full step (both coils energized at 71%)
set_speeds(283, 283);
break;
case 1: // quarter step (coil 1 at 38% and coil 2 at 93%)
set_speeds(153, 370);
break;
case 2: // half step (coil 1 at 0% and coil 2 at 100%)
set_speeds(0, 400);
break;
case 3: // quarter step
set_speeds(-153, 370);
break;
case 4: // full step
set_speeds(-283, 283);
break;
case 5: // quarter step
set_speeds(-370, 153);
break;
case 6: // half step
set_speeds(-400, 0);
break;
case 7: // quarter step
set_speeds(-370, -153);
break;
case 8: // full step
set_speeds(-283, -283);
break;
case 9: // quarter step
set_speeds(-153, -370);
break;
case 10: // half step
set_speeds(0, -400);
break;
case 11: // quarter step
set_speeds(153, -370);
break;
case 12: // full step
set_speeds(283, -283);
break;
case 13: // quarter step
set_speeds(370, -153);
break;
case 14: // half step
set_speeds(400, 0);
break;
case 15: // quarter step
set_speeds(370, 153);
break;
}
}
// This is a blocking function that repeatedly takes a single step and then
// delays for step_delay_us microseconds. When it finishes, the stepper motor
// coils will continued to be energized according to the final step so that
// the stepper motor maintains its position and holding torque.
void multi_step(int steps, unsigned int step_delay_us)
{
unsigned char dir = 1;
if (steps < 0)
{
dir = 0;
steps = -steps;
}
while (steps--)
{
one_step(dir);
delayMicroseconds(step_delay_us);
}
}
void setup()
{
md.init();
}
void loop()
{
if (stepMode == FULL_STEP)
stepMode = QUARTER_STEP;
else
stepMode = FULL_STEP;
multi_step(400, 5000);
delayMicroseconds(500);
for (byte i = 0; i < 4; i++)
{
multi_step(-100, 2000);
delayMicroseconds(100);
}
}
-Jeremy