hola a tod@@ss !!
Quisiera alimentar mi Arduino y la Controladora con una misma fuente de 11.5V.
Me podeis indicar mas detallado como conectar la controladora con Arduino mediante el puente descrito en el apartado 3a 3…, pues :
- Tengo un puente VREG y ARDVIN mediante la pieza pequeña azul
- y he conectado desde el pin ARDVIN a mi placa Arduino con el pin VIN
… y No Funciona
Me podriais indicar alguna Biblioteca para funciones y comunicarme con Arduino para mover a mi gusto. los motores…
Muchas gracias y un cordial saludo
Hello, Manuel-Sev
Thank you for your interest in our products. Unfortunately, we only offer assistance in English. A distributor near you might be able to offer you help in another language.
I am sorry we cannot answer your current request. Please post again if you can communicate in English.
-Derrill
[quote=“Manuel-Sev, post:1, topic:19376”]
como conectar la controladora con
[/quote
Hello everyone!!
I would like to feed my Arduino and controller with the same 11.5V source.
You can tell me how to connect the controller with Arduino using the bridge described in section 3a 3…, because :
I have a VREG and ARDVIN bridge using the little blue piece
and I’ve connected from the ARDVIN pin to
my Arduino board with the VIN pin … and It doesn’t work
Anything else I haven’t connected?
Thank you very much and a cordial greeting
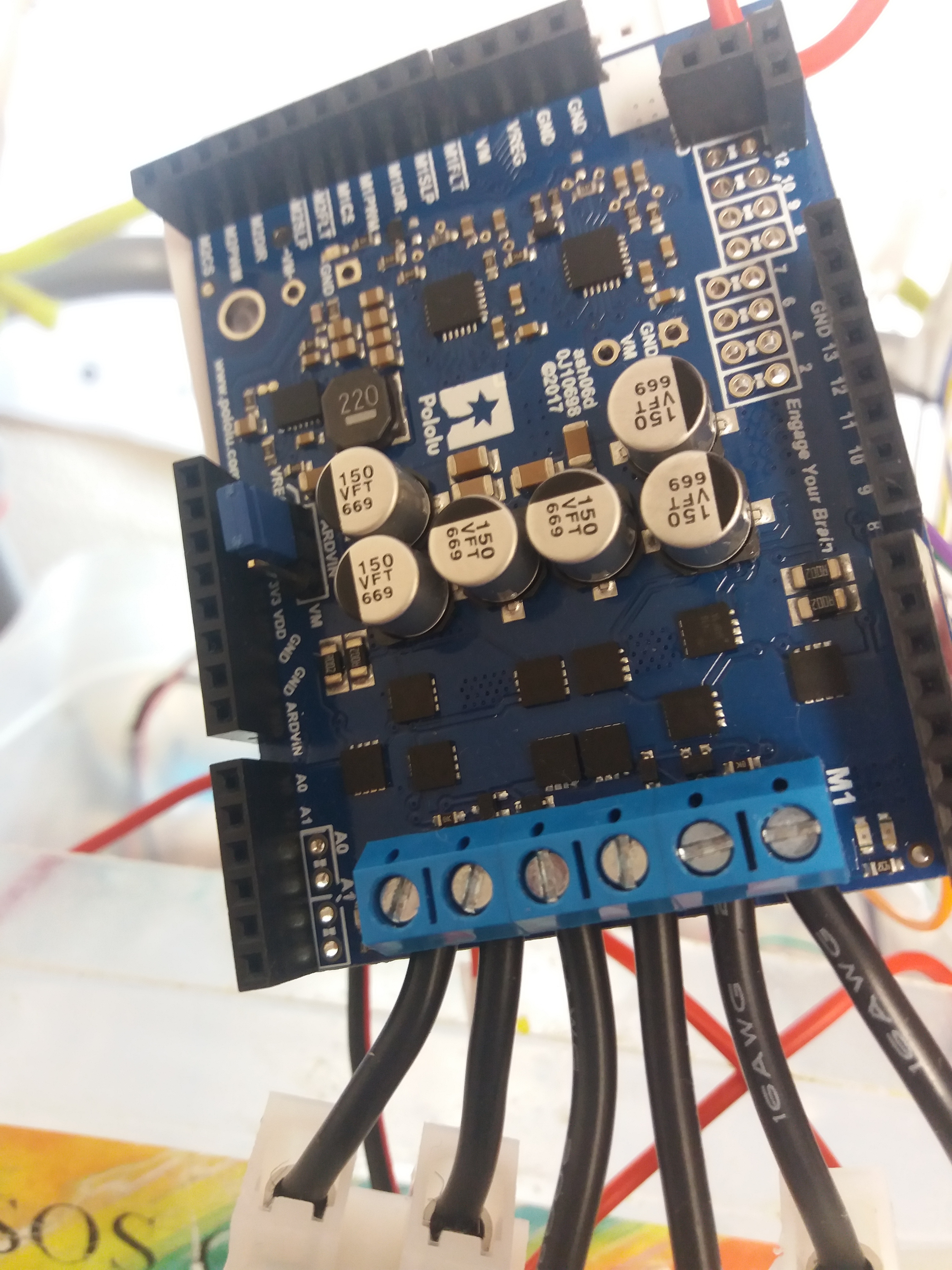
Can you post pictures of both sides of your 18v18 and of your complete setup that show all of your connections?
-Derrill

From what I can see your soldering seems okay. I cannot tell much about your connections from your pictures.
I also do not see any indication of a ground between the two boards, so that could be the issue.
I suggest testing those boards with no other connections and if possible by mating the shield to the Arduino directly to avoid any possibility of incorrect wiring.
-Derrill
Hello everyone!!
I can’t execute on my scketch and based on the Demo the following actions by varying each action and similar loop:
- 2 engines at the same time forward and stop
- 2 engines at the same time back and stop
- 2 engines at the same time, in the opposite direction
I can’t get the proper functioning if I alter the loop for each of the above 3 options.
You can help me, because I would like to add another Dual G2 and two more engines.:
.
if (VpinValueOld27 == 1) {
md.enableDrivers();
delay(5);
for (int i =0; i <=500; i++) {
// ------------This is where I have my biggest malfunctions in the 3 options… by putting or activating the two engines together
md.setM1Speed(222); delay(5);
md.setM2Speed(-222); delay(5);
// ---------------------------------------------------------------------
}
} else {
md.disableDrivers(); delay(5);
}
Thank you very much and a cordial greeting
I merged your post together since the are likely related. Have you tested the driver with the setup and unmodified demo code as I suggested? Making sure the driver is working with the simple setup and demo code, can tell us if the problems are code or setup related.
-Derrill
Hello everyone!!
the scketch already works, but I have had to set the same pin values as the original library… because if I change them I have problems in the running engines
If you added another controller to the arduino mega or several will have a problem with the pin assignment because they are set…
-----. how I could add more drivers and motors with different pins
----- how I can connect or wire to use the same power supply for controllers and arduino mega
thank you very much for the answer
and a greeting
If you are not connecting the devices as a shield, you can use the alternate constructor to remap which pins are used in the library, so you can configure them yourself. You can find information on the alternate constructor under the “Library Reference” heading of the G2 High Power Motor Driver Shield library’s GitHub page.
You will only need to connect one shield ARDVIN connection to the Arduino to power it, from your previous pictures that looked fine for that Arduino and shield. Does that work for those two units now?
It would also be helpful to know more about your system. Can you tell me how many driver boards you want to connect?
-Derrill
Hello everyone!
I have Dual G2 18v 18 and pololu engines
I’m having problems with the library : DualG2HighPowerMotorShield
You can make it easy for me to move the engines with : digitalWrite( ,HIGH);
forward, back and stop.
or give me another library, this one’s giving me problems
_M1nSLEEP 2;
_M1nFAULT 6;
_M1DIR 7;
_M1PWM 9;
_M1CS - A0;
I’d really appreciate it…
a greeting
You can control those drivers with digital signal using digitalWrite(), but you will only get full speed forward and reverse, no real speed control. That method seems very clunky.
Can you clarify what all is in your system now (e.g. how many drivers are you using)? Also, did you modify the library directly instead of calling the alternate constructor that I pointed you to? It might help if you could post your code and describe what happens when you run it.
-Derrill
Thank you very much Derril!!
I have a controller A Dual G2, DC motors 12V 37x57mm - 131:1
I work with Blynk and my boards are: mega2560 and ESP8266 WeMos D1 with I2C
I have not modified the Library and the pins are set just like those established
md.setM1Speed(-248); md.setM2Speed(248);
The scketch work very well always, but I always have problems when M2 is in negative md.setM2Speed(-248); it’s like it’s positive, it doesn’t recognize it
M1 works perfect in positive and negative
I’ve done a lot of tests on this scketch and others…
some have worked well M2 but the structure in all scketch is the same
Thank you
Can you try running the unmodified “Demo.ino” example and see if you get the expected results (e.g. each motor ramping up and down in alternating directions)? If you do, I suspect the problem is likely in your code or a conflict with another library. Can you post the smallest complete sketch that exhibits the problem here so I can take a look at what you are doing?
-Derrill
Hello Derrill!!!
.Thank you very much Derril.!!!.. My Dual G2 now works very well
I had to review a lot to see that the Servo.h library was failing <DualG2HighPowerMotorShield.h> , because it had old code for a Servo that I now don’t have and with the same Pin for both.
a Greeting and thank you very much Derril!!!
2 Likes