
I’ll let Ryan address the avrdude problems you’re having since it sounds like he might have already solved them, but a quick search of the error you received led to this page:
avrdude.sourcearchive.com/docume … ource.html
It seems that avrdude is restricting the baud rates to the values in this table:
static struct baud_mapping baud_lookup_table [] = {
{ 1200, B1200 },
{ 2400, B2400 },
{ 4800, B4800 },
{ 9600, B9600 },
{ 19200, B19200 },
{ 38400, B38400 },
{ 57600, B57600 },
{ 115200, B115200 },
{ 230400, B230400 },
{ 0, 0 } /* Terminator. */
};I also found a forum post where someone got past this limitation by rewriting the look-up function to just return the supplied argument.
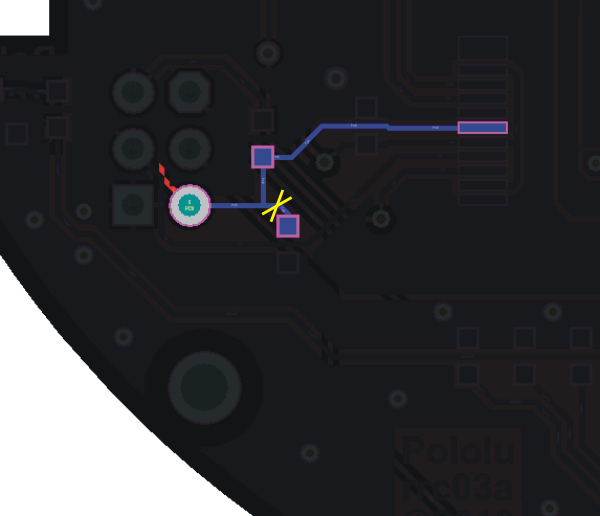
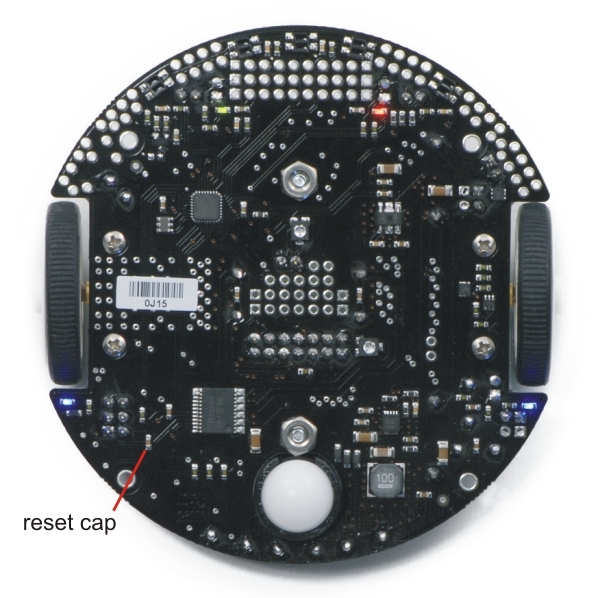
The 3pi and Baby Orangutan both still have capacitors to ground and pull-up resistors on their reset lines. More recent Orangutans, like the Orangutan SVP no longer have these components. The following diagrams show the relevant components and have yellow marks where I suggest you cut the traces. Please note that cutting the traces elsewhere could cause pretty big problems, such as making in impossible to reprogram the AVR with an ISP programmer (the programmer needs to be able to hold the AVR in reset during programming).
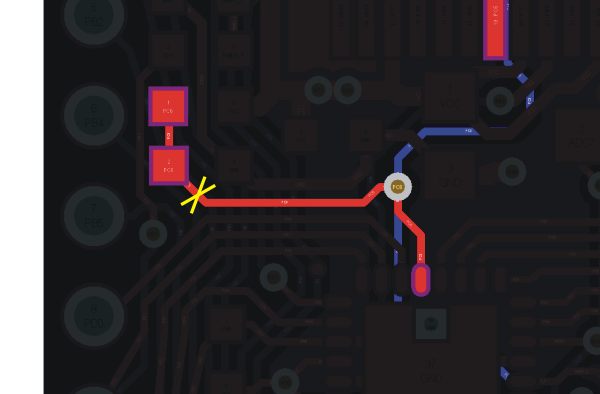
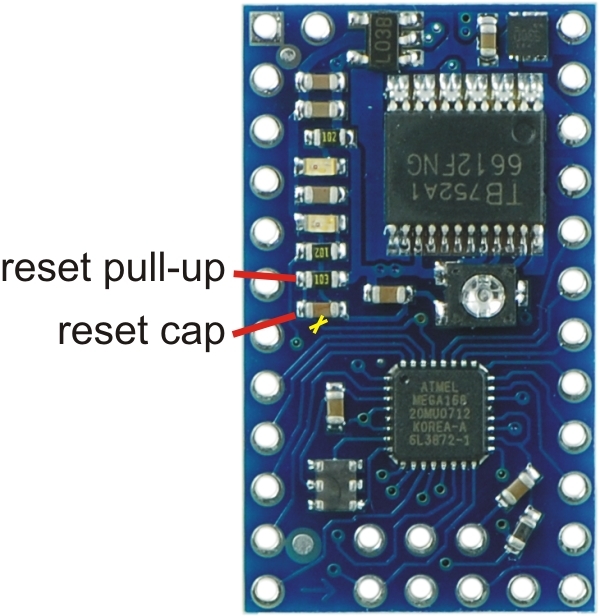
Note that my suggested cutting point on the Baby Orangutan will also sever the reset line’s pull-up resistor, but the AVR has an internal pull-up on the reset pin, so this won’t hurt anything. If you already cut your traces elsewhere, you might need to repair the cut and try again.
Please let me know if you have any questions.
- Ben