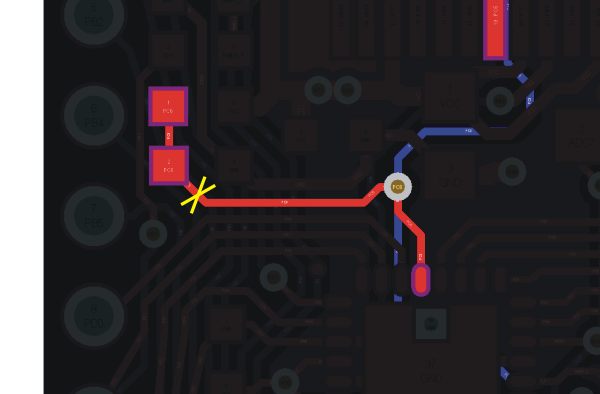
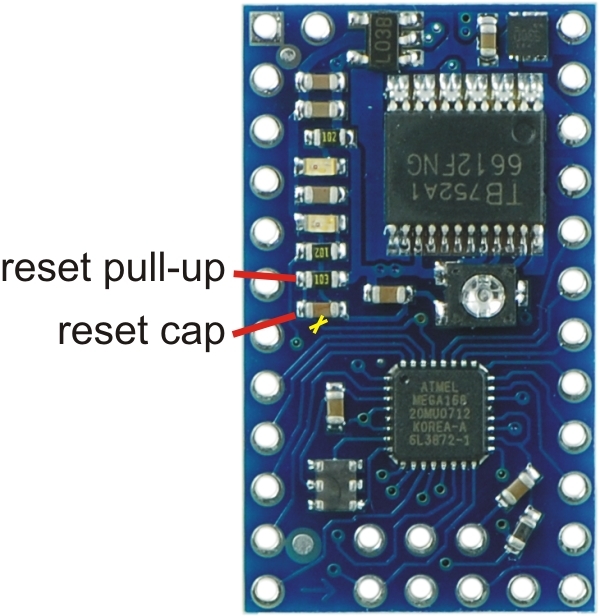
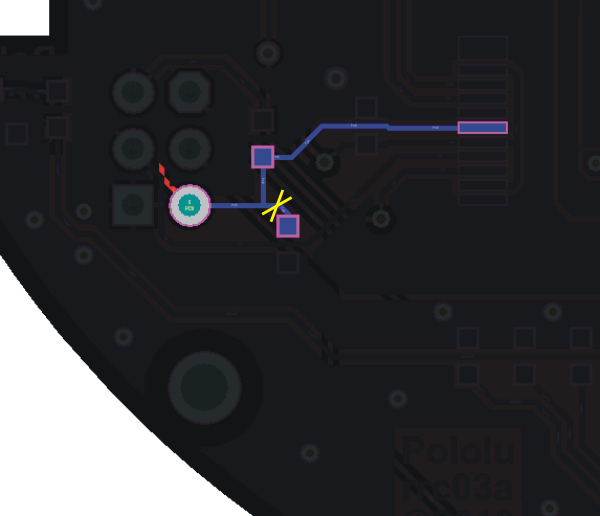
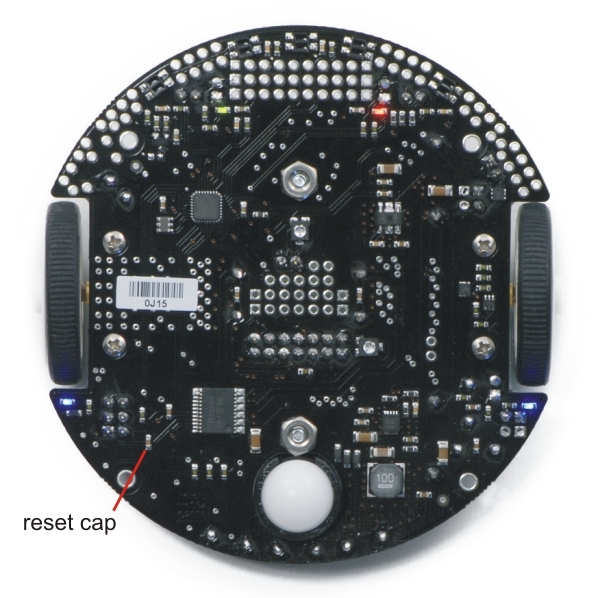
I’ve been attempting to setup a 3pi and Baby Orang (both with 328p’s) to program from the Arduino IDE using a bootloader. The standard Arduino bootloader (optiboot, which is for 16mhz) does not work. Someone on this forum had recommend a 20mhz bootloader which I’ve tried. It works for one download after being burned, but requires being burned again to work again. I would guess that the auto-reset is part of the problem. I have a .1uf cap from my DTR line to the reset pin, which is how the Arduino auto-resets. I’ve also tried a 1uf cap, to attempt to extend the reset time. However, the 3pi and Baby Orang have a .1uf cap going to ground, which could be causing trouble.
So does someone have a working bootloader or hardware work-around?
If you’re wondering why I can’t just use the AVR ISP programmer, it’s because I’m testing the Baby Orang for educational purposes, and students can’t be trusted as well to check the batteries before programing. The possibility of bricking a chip because of low voltage really bothers my friend who is teaching robotics courses for middle/high schoolers.