
Hi,I bought a new piece of Dual VNH5019 driver, but I do not know how to connect.I have a reference connection method, but no action.
I use the Arduino UNO3 board.
This is my process.
This is my connection diagram.

I moved your thread to the “Motor controllers/drivers and motors” section of the forum since it seemed more appropriate.
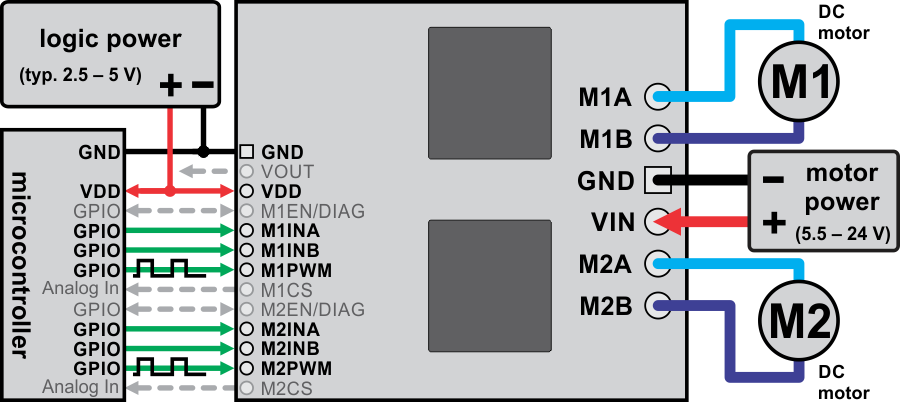
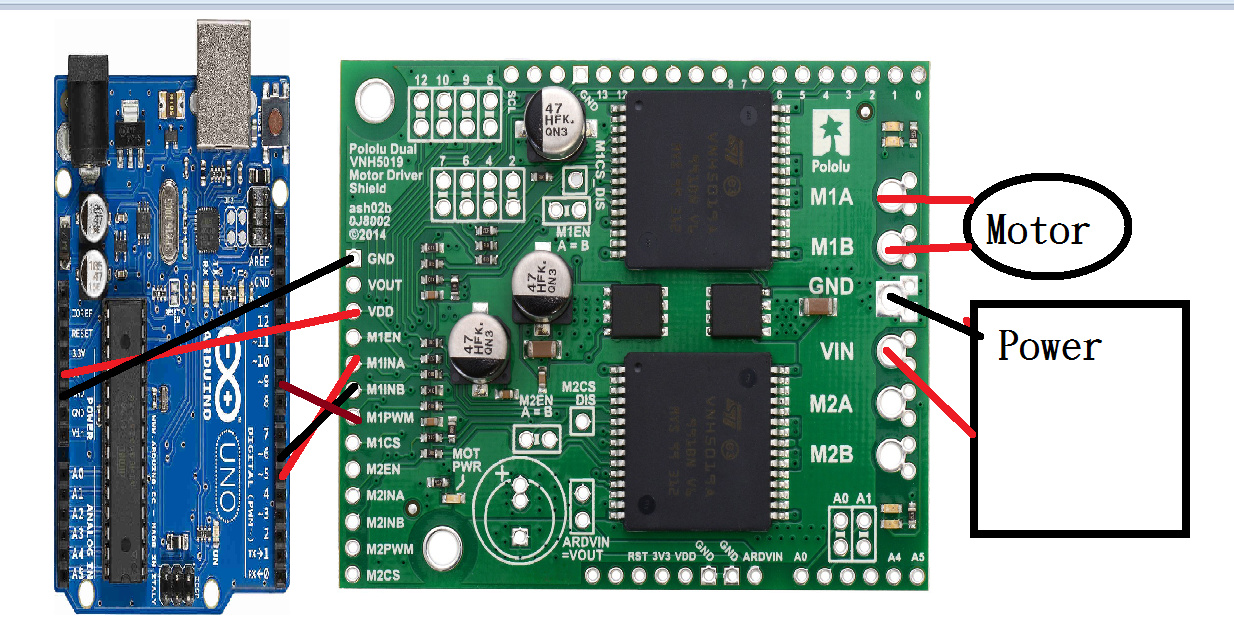
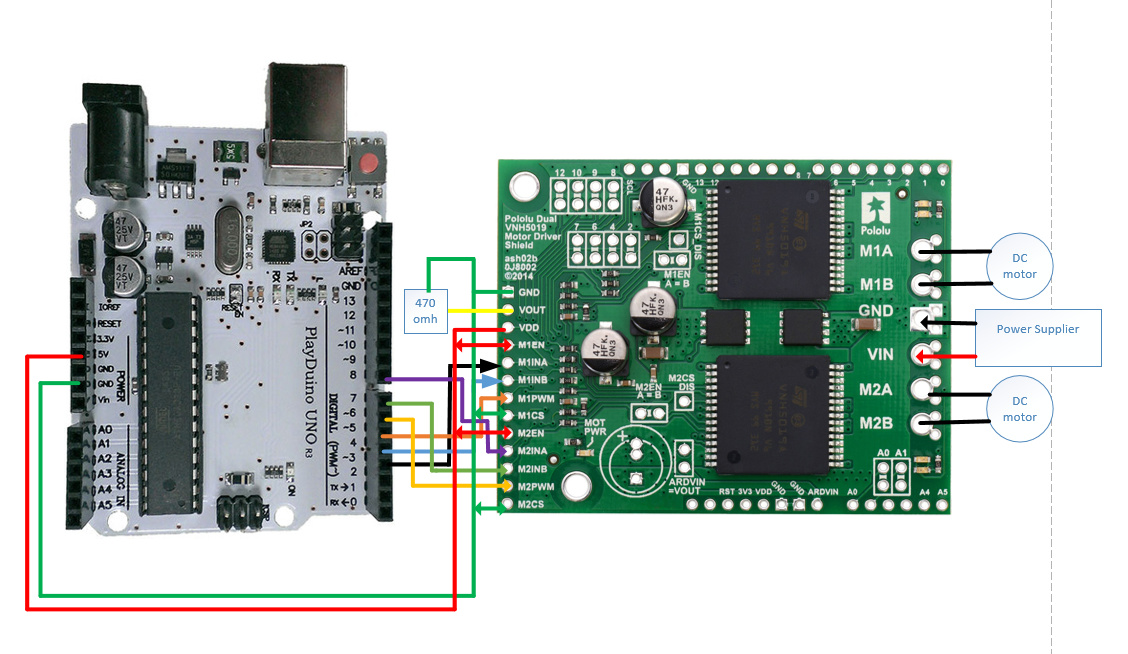
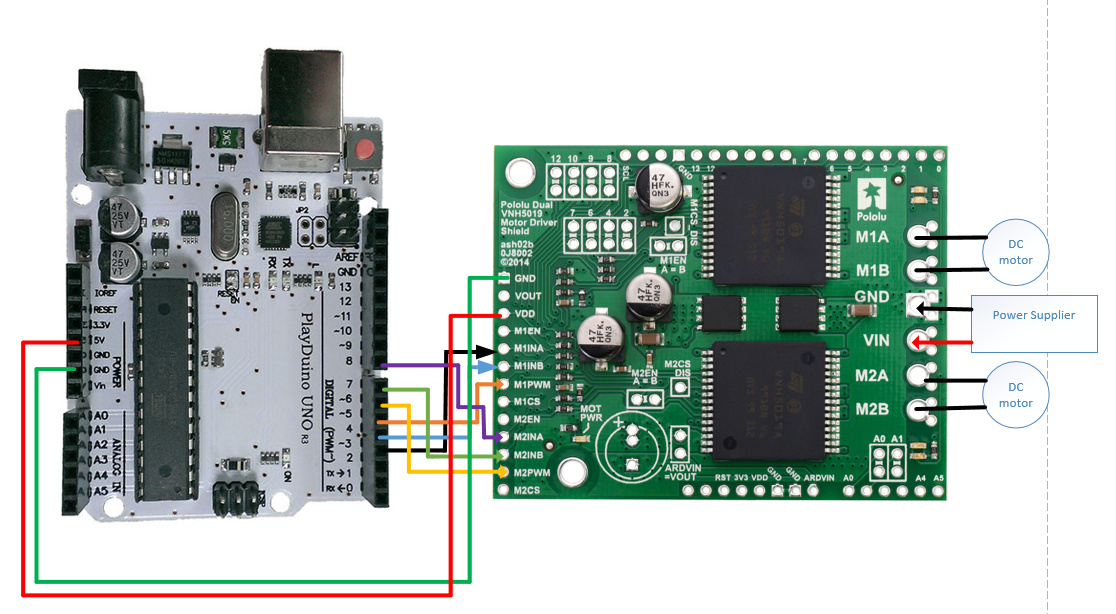
It looks like you probably do not understand the control scheme required to control the driver and are missing a few required connections. The picture below (from the VNH5019 driver shield’s product page) shows the connections to use the shield as a general purpose driver:
Alternatively, you could use it as an Arduino shield, which takes care of all of the connections for you.
To drive a single motor connected to M1A and M1B you will need to send digital signals to M1INA and M1INB to control the direction and a PWM signal to M1PWM to control the speed. You might find our Arduino library for the Dual VNH5019 Motor Driver Shield helpful. Even if you do not mount the driver on the Arduino as a shield, you can still use the library if you make connections to the same pins. The default pin mappings can be found in the “Shield Connections” section of the VNH5019 shield’s user’s guide, and an explanation of each pin on the board can be found in the “Board Connections” section of that same guide.
If you continue having problems after looking through that information, can you post an updated picture of your connections and code?
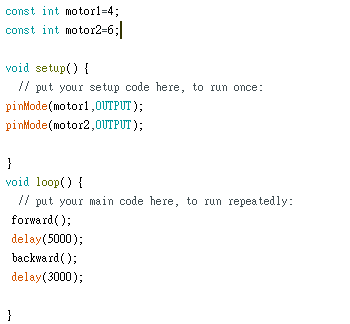
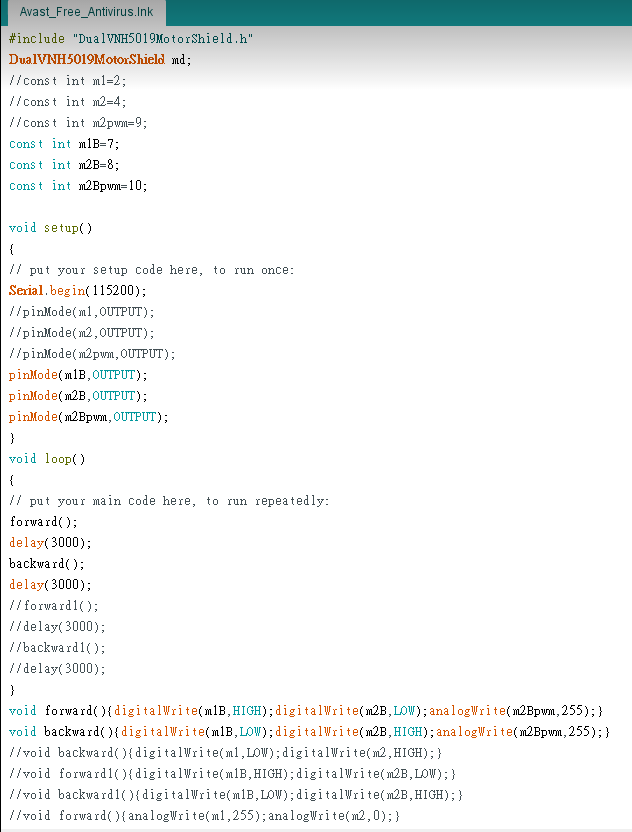
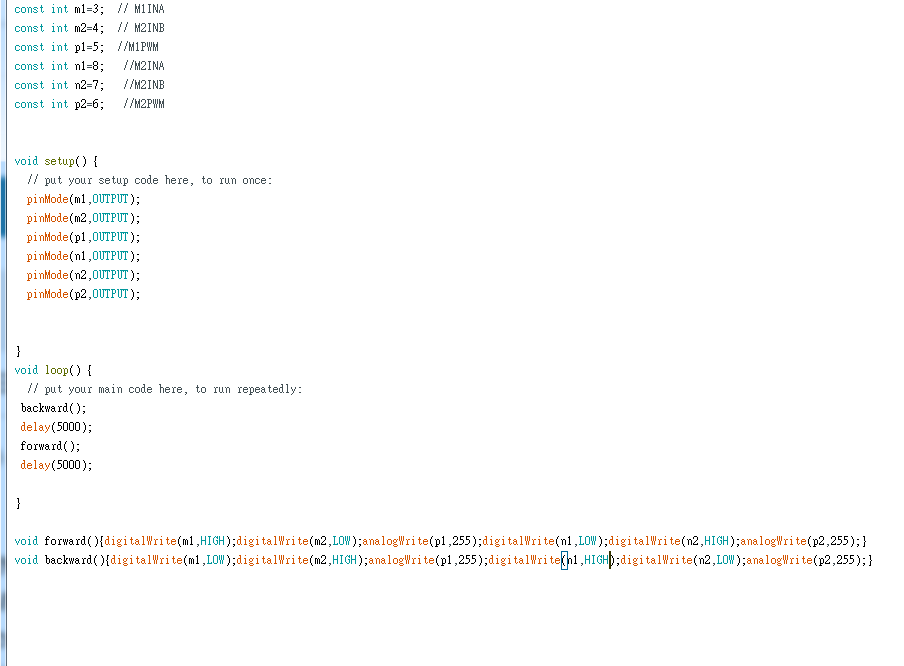
This is my program.
This is my diagram.
But did not act.Only the indicator lights are red and yellow.
Thank you for the updated code and connection diagram. I do not see any problems with your latest setup.
Are you referring to the red and green motor indicator LEDs (by the M1A and M1B terminal blocks)? Have you tested your motor separately to make sure it works? Could you try removing your motor from the system and measuring the voltage output of the M1A and M1B pins while your program runs? If you are not getting the expected output from the M1A and M1B pins, can you post pictures of your updated setup, including close-up pictures of both sides of the VNH5019 shield? Also, can you tell me what power supply and motor you are using?
Brandon
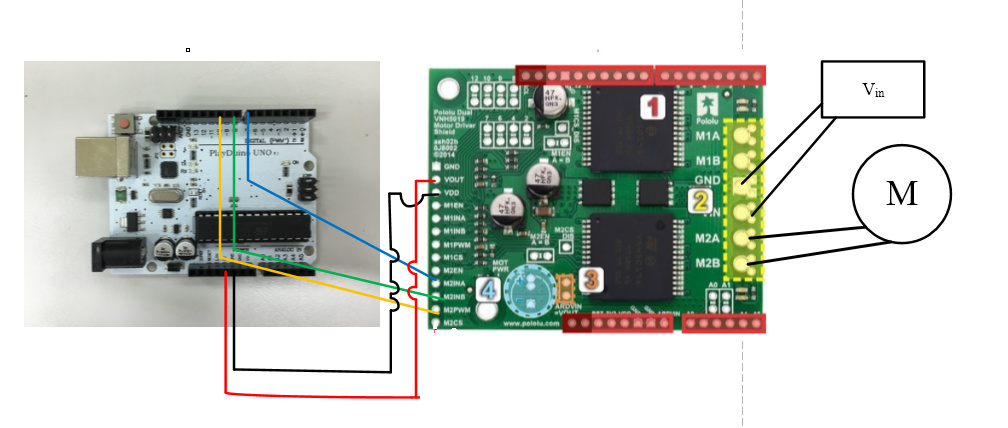
Hi,this is my connection diagram.
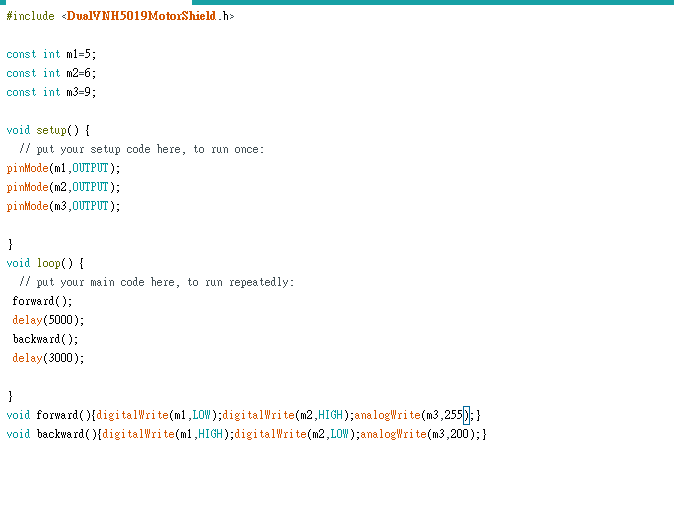
This is my process.
I want the motor to be forward and backward.
M2A to GND have voltage. And M2B to GND have also voltage. But M2A and M2B are the same electrical potential difference. So the motor is stationary. The indicator lamp will change red and yellow.
default M2EN is high. M2Cs is low.
So I do not know why the motor can not output.
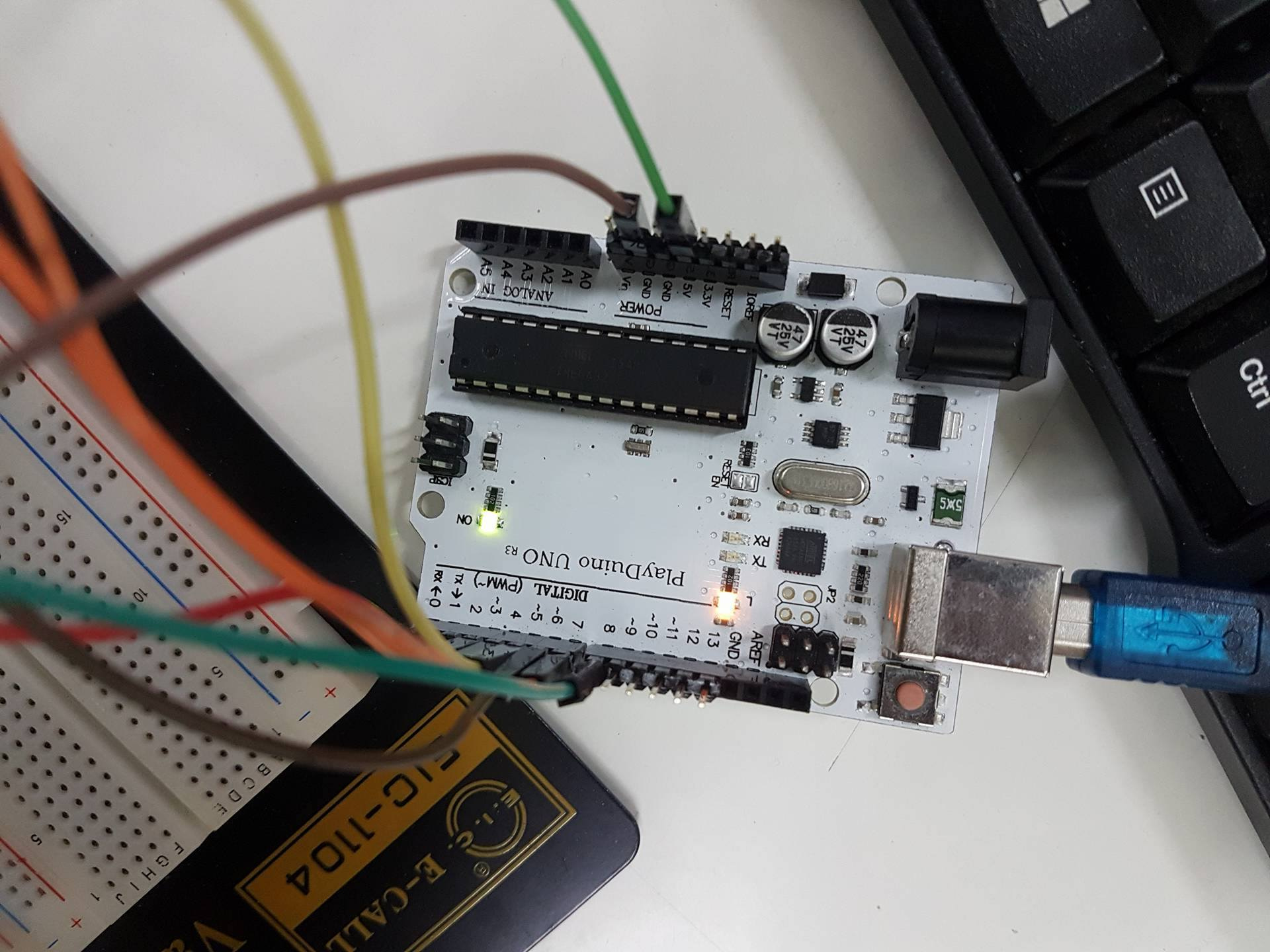
It looks like there are connections being made in the actual pictures of your setup that are not shown in your connection diagram, and unfortunately, your pictures do not show your Arduino, so I cannot tell what they are. Additionally, your wiring diagram shows GND on the Arduino being connected to VDD on the VNH5019 shield and 5V on the Arduino being connected to VOUT on the VNH5019 shield. Are those connections actually being made in your setup?
The indicator LEDs are directly between the output pins, as shown in the schematic on the VNH5019 shield’s product page, so there is definitely a voltage difference between the outputs in your pictures. Do you have you motor connected while testing? Can you tell me what motor and power supply you are using?
Brandon
The connection diagram above is wrong. I’ll repost one.
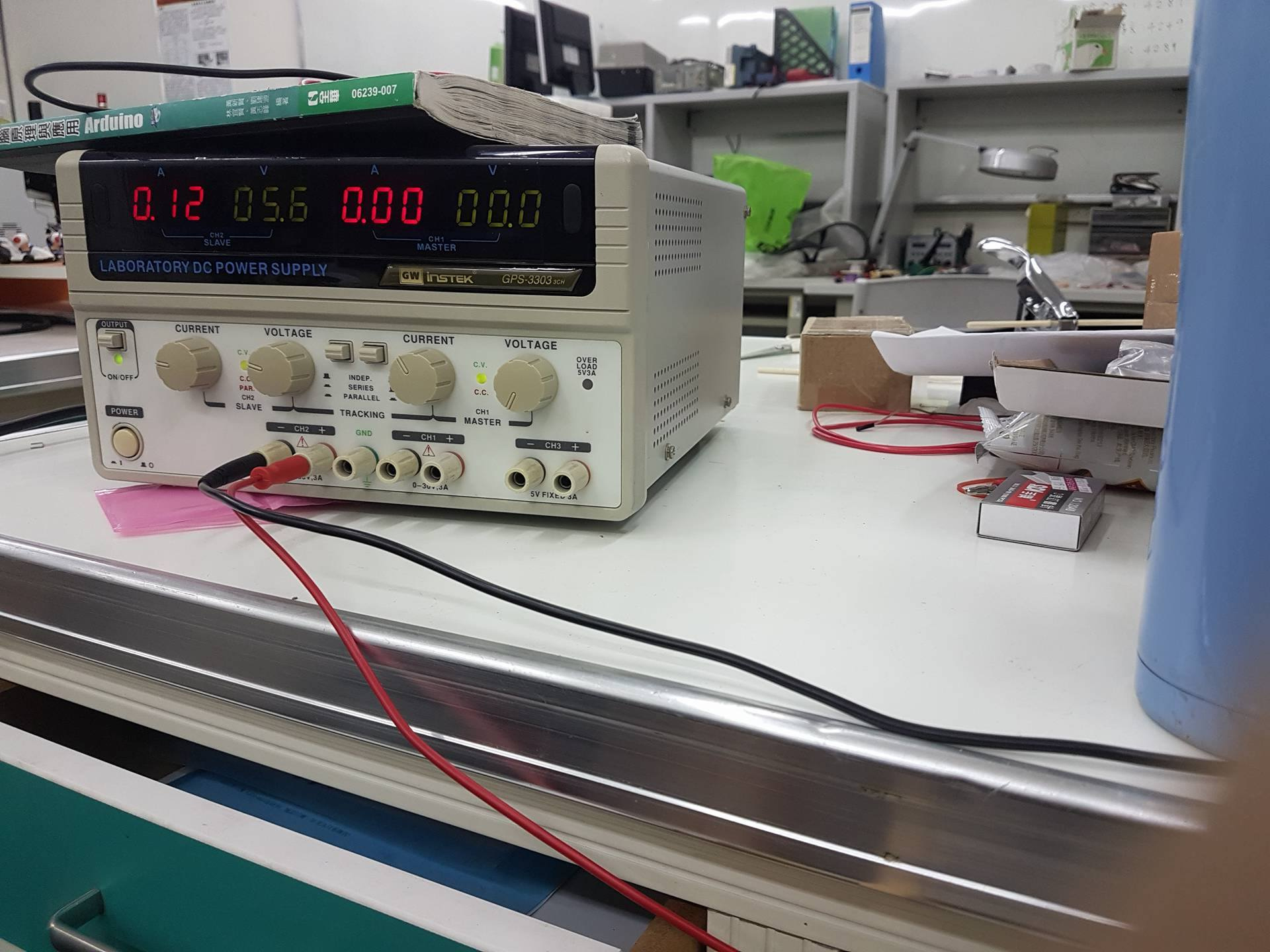
I use playduino UNO R3 and Dual VNH5019 driver. The power supply is a DC power supply.
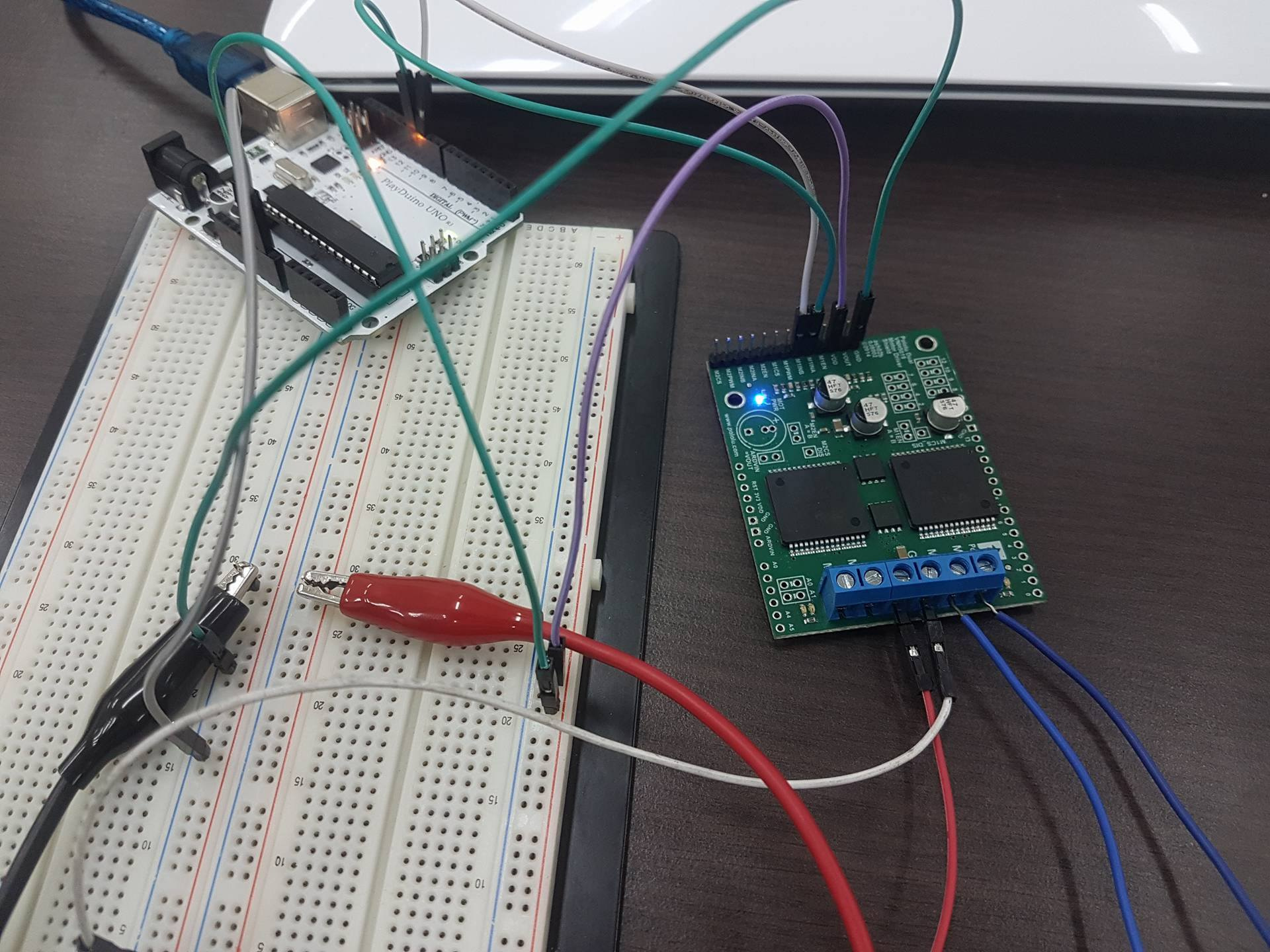
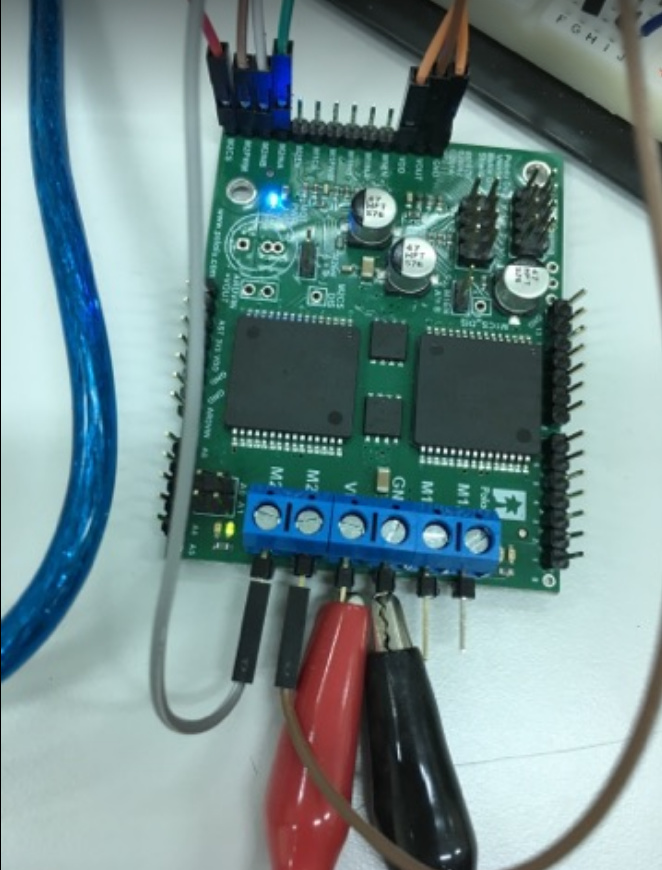
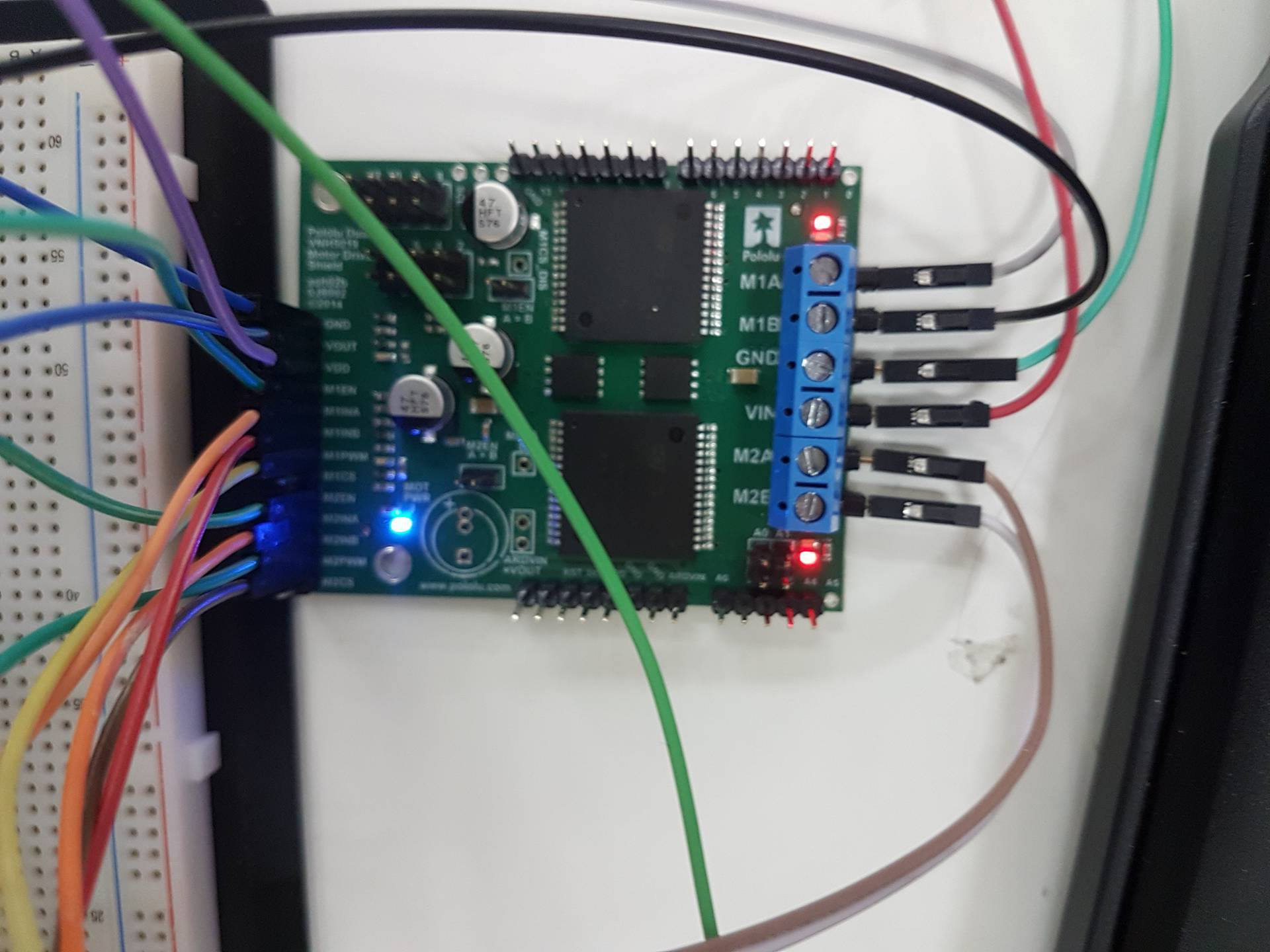
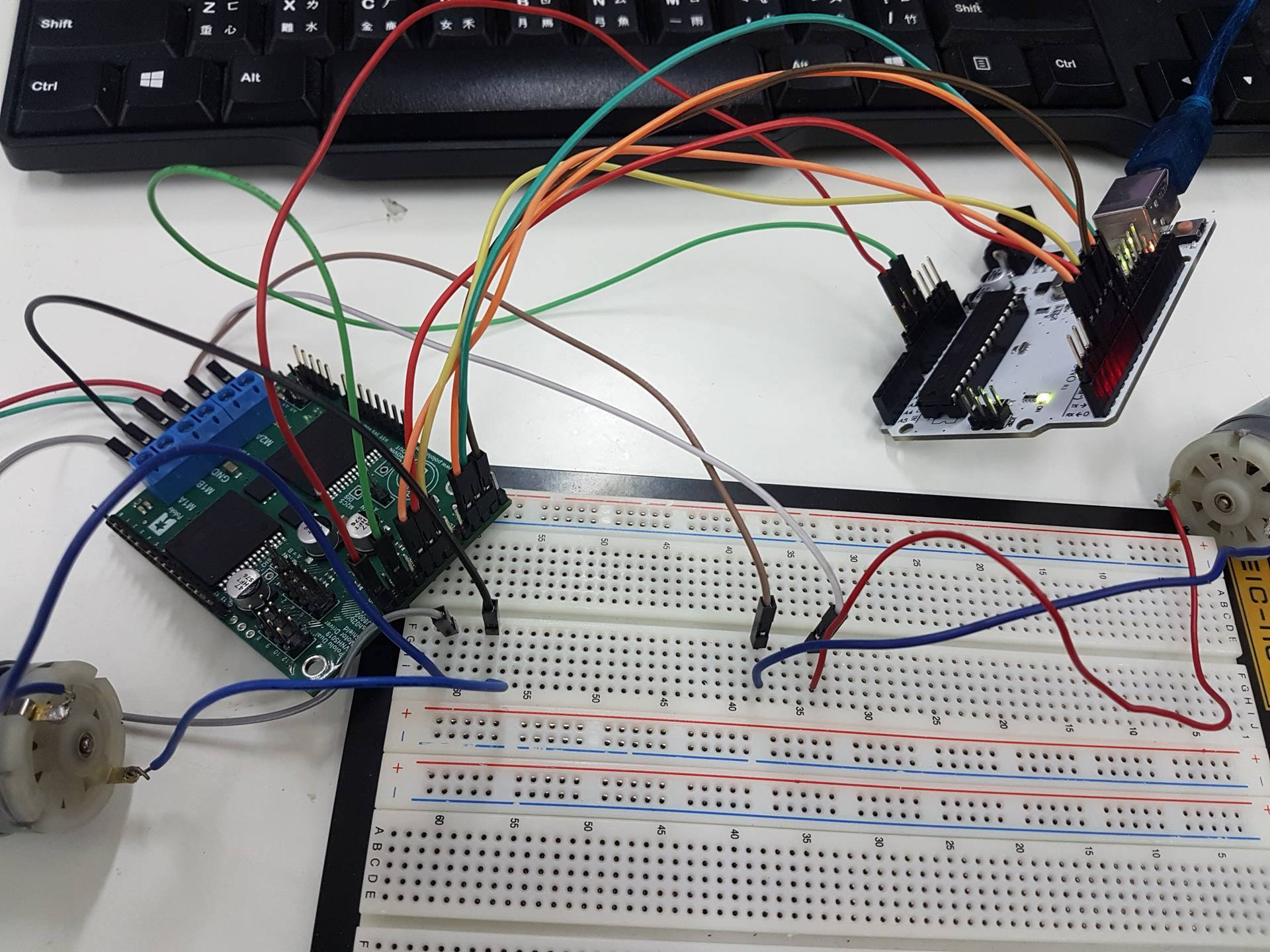
This is actual picture.
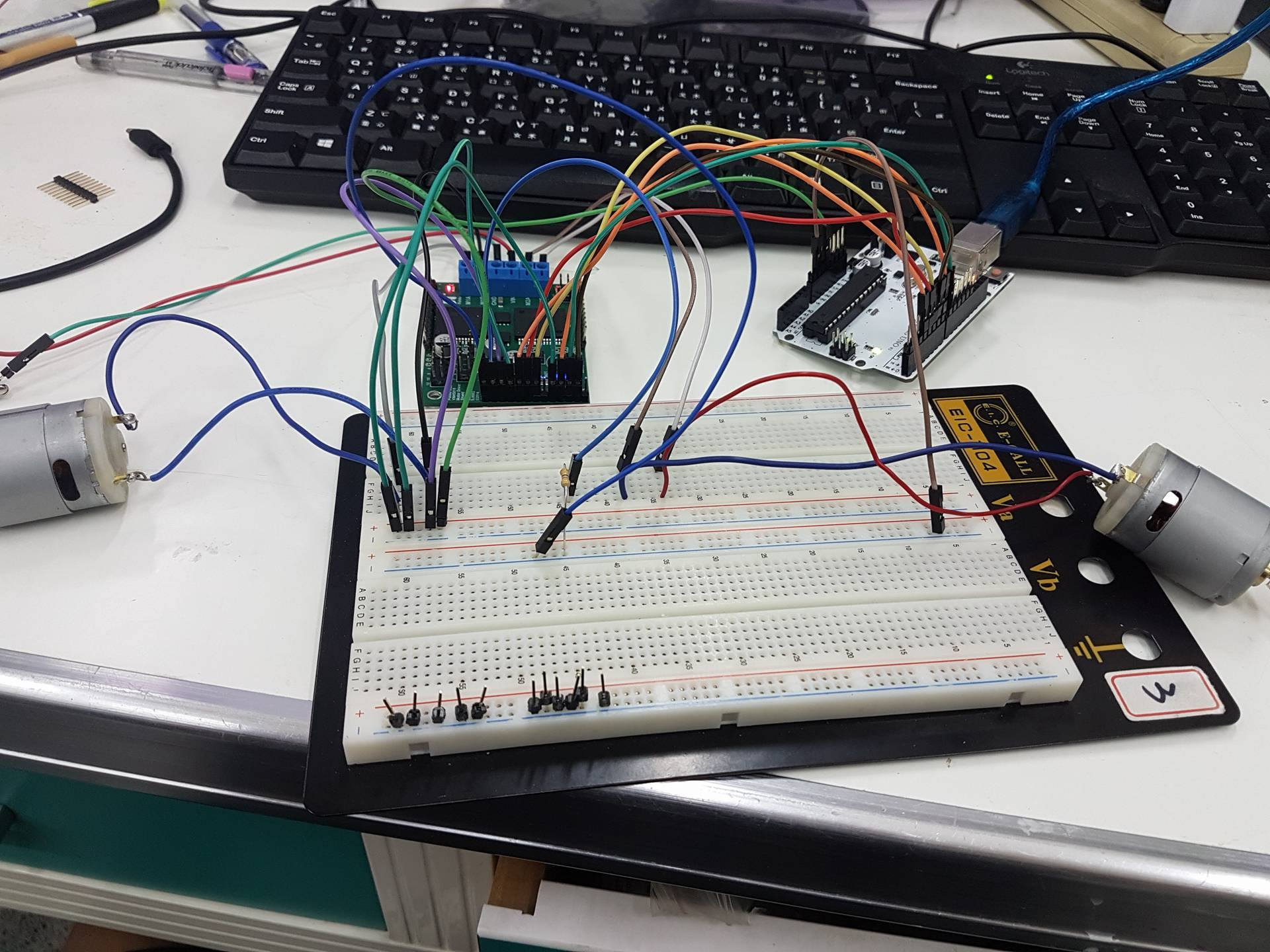
This is process.
Two motors did not move. M2INA and M2INB with the same voltage difference. So the motor 2 is stationary.
M1INA and M1INA have no voltage.
I do not know why the motor did not move. I think the drive is broken. But the drive is new bought.
Thank you for the updated wiring diagram and pictures. I noticed your system keeps getting more complicated with each post. I recommend simplifying everything until you find out what is causing a problem. Additionally, in your latest wiring digram, you show a resistor between VOUT and GND. I do not see any reason for it; it is likely just causing unnecessary current draw. You should not need to connect anything to the VOUT pin on the logic side of the board. Also, you should not be connecting the M#CS pins to ground. Those pins are outputs, so they should either be connected to Arduino pins defined as inputs or left disconnected. Another thing I noticed is that your power supply is set to 5.6V, which is very close to the 5.5V minimum operating voltage of the VNH5019 shield.
Could you try increasing the voltage (maybe to around 7V) and removing all of your connections to the logic side of the board except for the required ones (shown in color) in the diagram I posted in my first post (GND, VDD, M1INA, M1INB, M1PWM, M2INA, M2INB, and M2PWM)? The M#EN pins are pulled-up on the board, so they should not need to be pulled high externally.
Brandon
Hello.
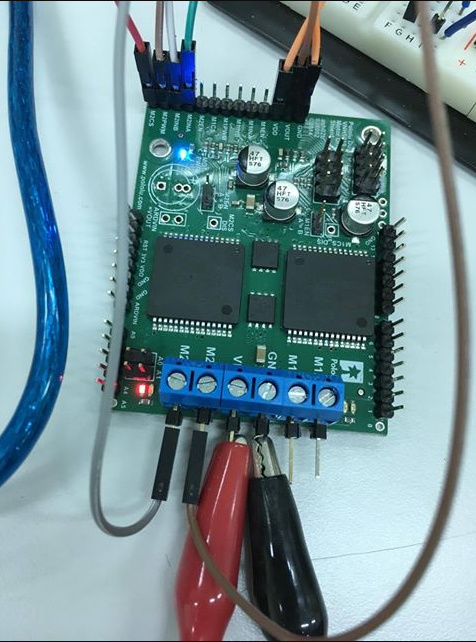
Thank you for simplifying and posting more pictures. I have a few more things I would like you to try:
-
Can you try disconnecting the motors from the rest of the system and powering them one at a time directly from your supply to make sure they work as expected?
-
If the motors both work as expected when connected to your power supply directly, can you try bypassing the breadboard and plugging the motor wires directly into the terminal blocks on the VNH5019 shield?
-
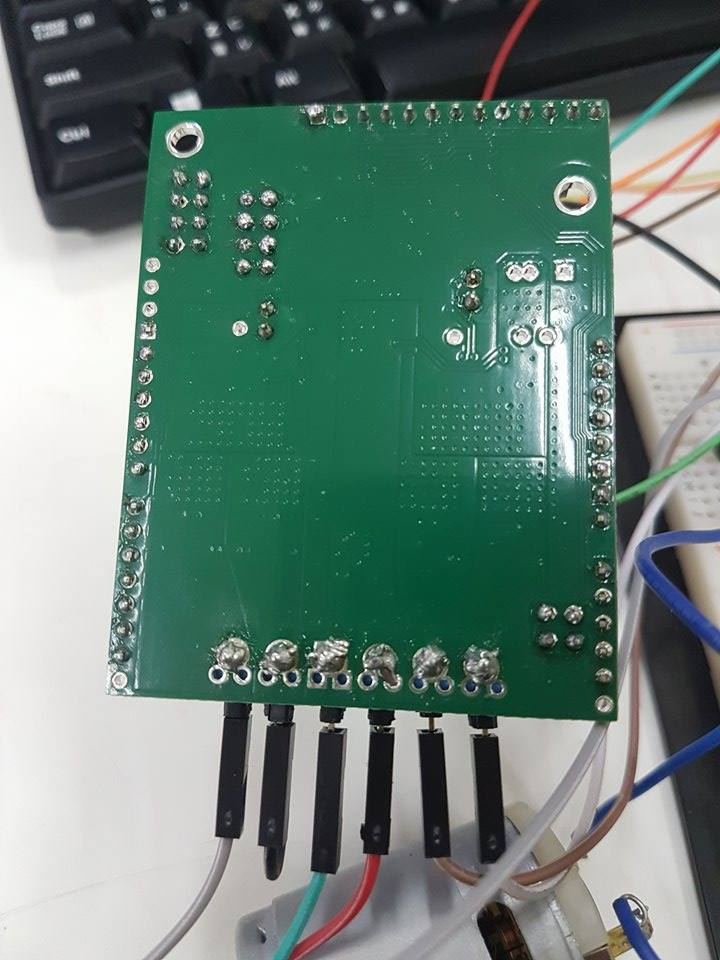
If the motors still do not turn in this setup, can you try touching up your soldering on the VNH5019 shield? Quite a few of the solder joints look like they might be cold joints and/or have poor wetting (e.g. the ground pin on the logic side of the board and the terminal block pins), and it is hard to tell if all of the logic pins have adequate solder from the picture. For reference, you can look at the example solder joints in the Adafruit Guide To Excellent Soldering
Brandon
Thank your help.
I have ruled out the problem
I am glad you were able to get it working! What did you determine the problem was?
Brandon