for a robotics competition I’m building a 4-wheeled robot, each wheel individually controlled by a DC motor. Currently I’m using these motors:
But I’ve only had issues with them, two of the five I bought died, suddenly they would stop moving and be really hard to turn by hand. I opened one up and couldn’t find anything weird. So I just assumed bad build quality. Now I want to buy similar form factor motors and found the 25Ds from Pololu. But even though they are way more expensive (considering they also don’t have an encoder), they seem completely identical, from torque, to speed, to looks. So what’s the difference? Or is it just a different name on the metal casing?
I’m very happy with the step down converters I bought from Pololu, but a 4x increase in price is insane just for the name.
Greetings from Germany
We haven’t specifically assessed those DF Robot gearmotors, so we cannot comment on how they might differ from ours. However, we manufacture ours ourselves, so they definitely are not identical. Please note that many things can superficially look the same but have different tolerances, materials, processes (e.g. hardening), and levels of quality control that all affect prices.
Thanks for the fast answer.
Can I expect your motors to work reliable for more than 30 hours of total use time (up to 1 hour continuous usage at a time), while not stalling the motors and keeping current to <1.2A? I need them for a robotics competition, so this isn’t completely crucial, but I still require reliability. Also, since the wheels are mounted directly to the shaft (using one of your metal adapters) and the robot uses tank like steering, there will be forces acting on the shaft when the robot is rotating. Can the motor handle forces on this direction?
My robot weights 1.5kg, so around 4N of radial Load. But I’m more concerned with axial load, since as described earlier, the tank steering creates an axial Force to the Wheels and therefore the motor. But I’m unsure in how to calculate the amount of force
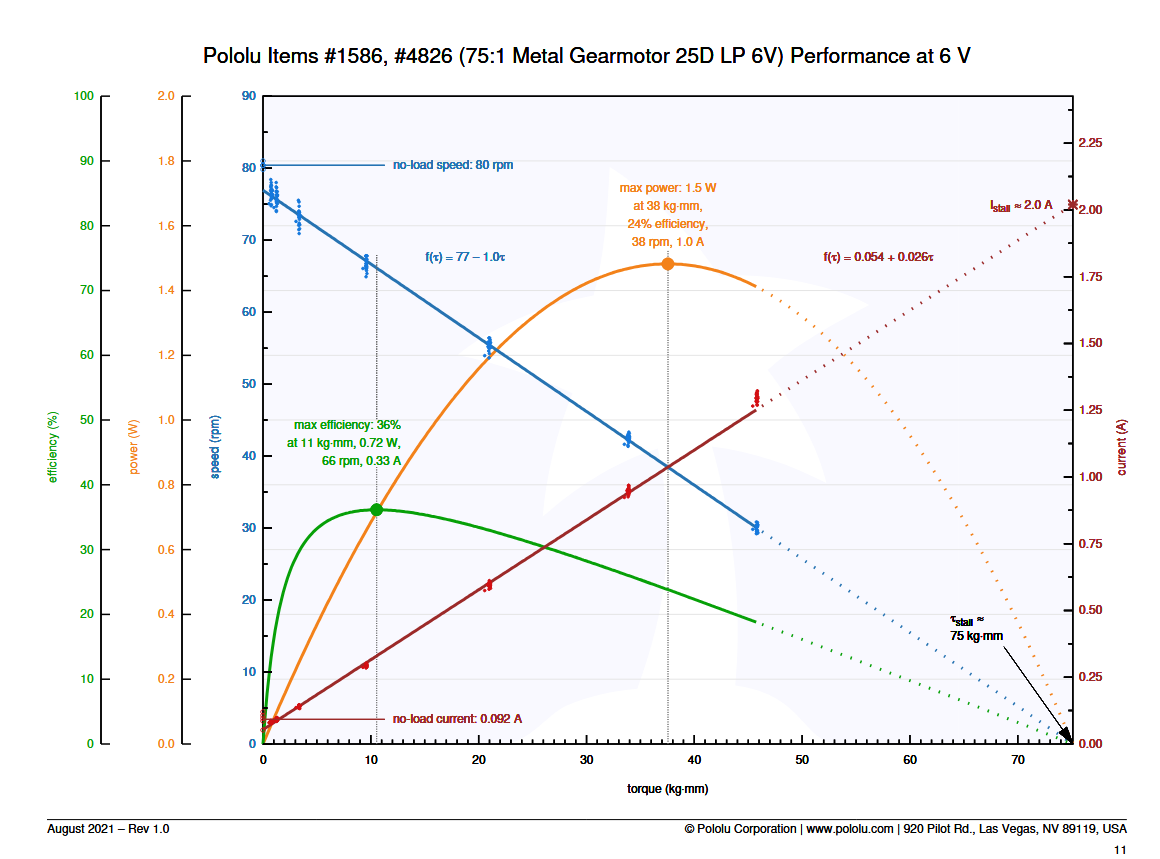
The low-power motors are not appropriate for an application where sustained currents could be as high as 1.2A. A general recommendation for brushed DC motors is to keep continuous operation under around 25% of the stall current to avoid thermal damage to the windings. For any of our 25D gearmotors, we also recommend limiting continuous loads on the motor at 4kg•cm to prevent damage to the gearboxes, and instantaneous loads should be kept under 8kg*cm.
With that in mind, the high-power version of that gearmotor, one of our other 6V high-power 25D gearmotors, or perhaps something from our larger and more powerful 37D family of gearmotors would probably be a better choice. You probably would need to test them yourself in your actual application to determine suitability. The lifetimes of gearmotors like these can depend on many different factors, and we have not characterized how radial or axial loads affect the lifetimes in detail, so I cannot make any specific guarantees.
In case it helps, the practical radial/axial load limit for our 25D gearmotors is probably around 0.5-1kgf per motor, and for our 37D gearmotors it is around 1-1.5kgf. If you expect radial or axial loads to be higher than that, then I would suggest decoupling those loads from the motor, such as through external gearing or belts and pulleys. I do not have much specific advice for estimating those loads, but I suspect this article, “The Art and Science of Selecting Robot Motors” might be interesting to you. Additionally, you might consider using omni-wheels or wheels with lower lateral friction for either their front or rear wheels of your robot to minimize the axial loads, though I do not have any specific recommendations for wheels like that.
Hi, I did some research and improved my motor requirement calculations. Thank you very much for the “The Art and Science of Selecting Robot Motors” document. We don’t expect a torque greater than 0.3 kgcm, with an average continuous torque of 0.2 kgcm. According to your motor graph, this means a max current of 0.75A and an average current of 0.6A.
This seems like a safe operating torque and current. I will order 4 motors from one of your distributors and test them.
My question now is, should I use the DRV8833 drivers with or without current limiting? And if with current limiting, what would be a suitable current?
We typically recommend choosing a motor driver that can handle the stall current of the motor continuously. The DRV8833 carrier could work, but it is somewhat underpowered for those motors, so if you have a little more space available, I would suggest using two of our newer MP6550 carriers. You can compare those drivers to each other and our other brushed DC motor drivers on this category page.
Both the DRV8833 and the MP6550 have adjustable active current limiting. Using active current limiting can help protect your motor and driver from damaging themselves if the motor is exposed to excessive loads, but it may also limit their acceleration rates when starting up or switching directions at high speeds. (Motors like these will usually draw their stall current briefly when they start up from a stop or switch directions at high speeds.)
Thanks for the Answer! Well, after using the 6v low power 75:1 25D Motors from Pololu for a week(around 7h of operation), I’m really pleased with their performance. The speed and torque are according to spec and until now, everything works really well. I’m actively measuring the current consumption and ensure that they don’t go over 1.25A for more than 1 second. And they definitely use a different motor from the previous “clone” 25mm gear motors. I haven’t cut one open yet, but the motor casing looks different and is lighter. I just ordered 4 new ones for a different team in my robotics school group