Hello All,
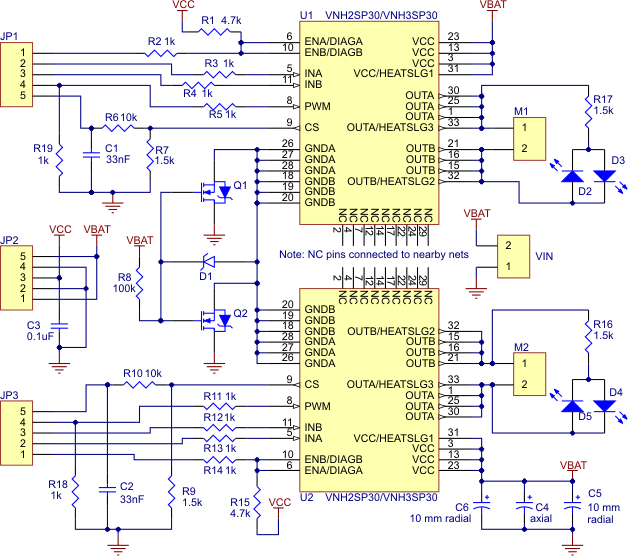
I am using a VNH2SP, and I made a pid controller using a tiva-c microcontroller board from texas instruments.
I also made a routine, that reads the voltage from CS pins of the dual motor carrier, average them, and plot amongst measured rpm vs applied pwm input, for both motors.
There is a small problem however, the CS_B output influences the CS_A. if CS_B rises above 0, CS_A will read 15-16 (16 / 1024 on a 3.3V scale) if CS_A rises above 0, it has no effect on CS_B.
I took a screenshot to illustrate the problem:
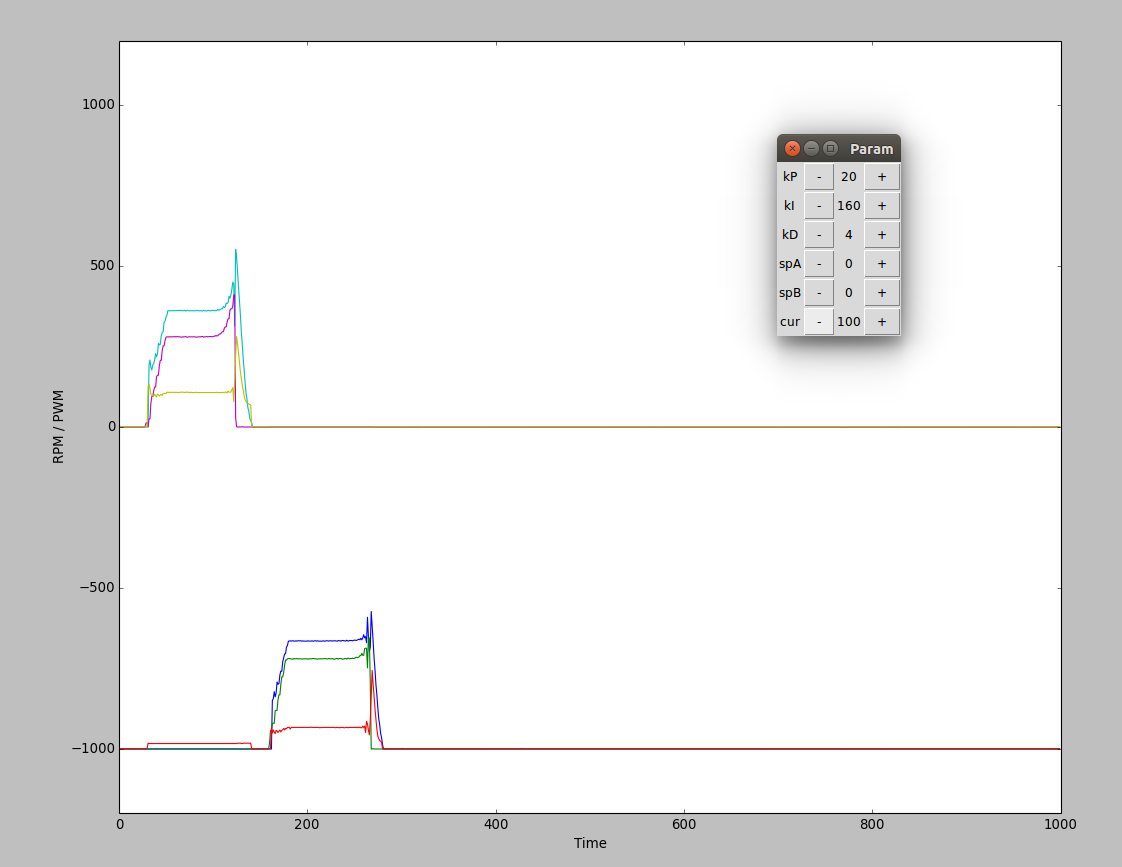
on the bottom of the screen, there is the motor a part. as seen input is given which leads to rpm, and output on a. (green and blue) - as seen, the red (CS_A) increases as well, and after the setpoint is set to 0, it will converge to zero along with the rpm and pwm - as expected.
I then apply a positive setpoint on the motor_b. (the above part of the screen - please notice that the time axis is reverse of what you would expect from a scope) the rpm, pwm and current rise, but notice how the red line on the bottom of the screen also rises a little bit. (it will not change relative to the CS_B but just sit there)
Also characteristics of CS_A and CS_B are different. It seems I get a %20 more reading from CS_B. All those are tested with currents under < 1A.
It seems like a little nuisance, and I could put a bias filter, on the CS pins, and go from there. But I want to figure out why this happens. Since it is a dual carrier board and has 2 VNH2SP’s on it, I dont think it is a chip problem. It could be related to the wiring of the polulu board, faulty component, or my measurement fault in general. I am planning to use the CS as a way to cut power to the motors, then the current increases above a threshold.
Any ideas/recomendations/help greatly appreciated.
Thanks,
C.