Hello, hello.
No output to motors, but the board seems to think it is doing it’s job (no errors).
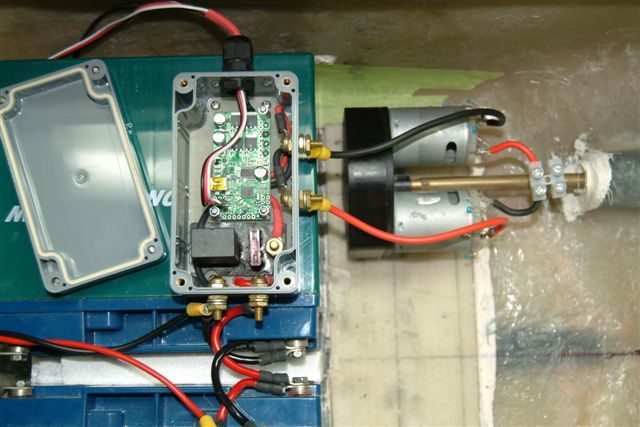
I have two 24V23 Motor Controllers in a boat (USV project) currently running with RC inputs for testing. The two units were previously operating, but now one unit has no output and does not drive the motor.
There are no errors (LED error light, or errors in the control center) but there is also no output to the motor. The second controller continues to operate just fine, with the same shared signal, power supply, etc.
On the non-output controller, it operates as if it is driving the motor, with the staus LED signaling acceleration for an acceleration signal, and no errors present. Viewing the USB Control Center (status tab) the status info shows the motor being driven without errors, but after approx 10 - 20 seconds of showing the Current Speed = Target Speed, the Current Speed drops to zero and the Safe Start Violation error is YES. No other errors are present, and the motor has not been driven throughout.
Meanwhile the second 24V23 controller is operating and has been driving the other motor combination just fine, with no problems. I am using a single common RC signal to both motor controllers.
System description:
- Boat / USV.
- Twin propellers.
- Two 12VDC motors per propeller, connected in series (24VDC motor combination).
- Motors: 12VDC, No load current 1.0A, Max current 54A, 16500 RPM, this is all I know about them.
- Two 24V23 Motor Controllers, each unit controlling a 24VDC motor combination of 2 x 12VDC motors connected in series.
- Power supply: 2 x 12VDC 20AH SLA batteries connected in series (24VDC 20AH SLA).
- Power supply: Each 24V23 is fitted with a 30A relay & 30A fuse in the power line.
Note 1: Power capacitors supplied with 24V23 are fitted.
Note 2: Power cables (battery terminal to 24V23 board) = approx 150mm long, 3.0mm2.
Note 3: Motor cables (24V23 board to motor terminals) = approx 150mm long, 3.0mm2
Note 4: Hard Limits are set to limit accelerations and inrush current, i.e 500ms delays, no braking.
Note 5: Under full power/load the 24V23 units shut down (overtemp). Water cooler heat sink is to be fitted to mosfets.
So, what is the problem with this non-output 24V23 motor controler that I have here.
Regards,
Jono