
Hello support,
I am tyring to controll a step motor using Tic T 500 pololu driver and I want to create another interface to control it (except pololu tic control center) in c++. I use ticcmd commands to control it and the problem is when I set the position as numerical for example 100, it doesnt stop at exact position.
API(double) tic_set_target_position(int32_t target)
{
char command[1024];
snprintf(command, sizeof(command), “ticcmd --exit-safe-start --position %d”, target);
return run_command(command);
}
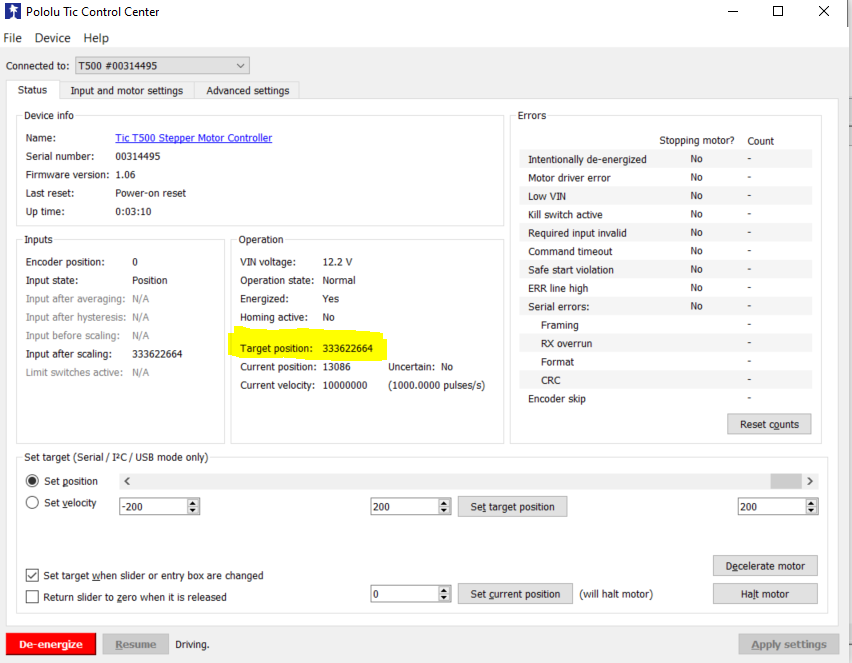
when I give the target position 100, the current position shown in pololu center is (Pic below):
Thank you in advance for your help
regards
Tom