
I need help getting the TIC 500 Stepper Motor Controller working correctly with an Arduino MKR WiFi 1010. I believe that the issues are with my coding as uploaded to the Arduino via the Arduino online editor, Arduino Create.
Scenario:
Now that my wife is in a wheelchair, we needed a way for her to open the bedroom door remotely. I have already had this setup working with another controller and a stepper that was too small to open the door against HVAC pressure in the bedroom. So I bought a new larger stepper and controller from Pololu.
Setup:
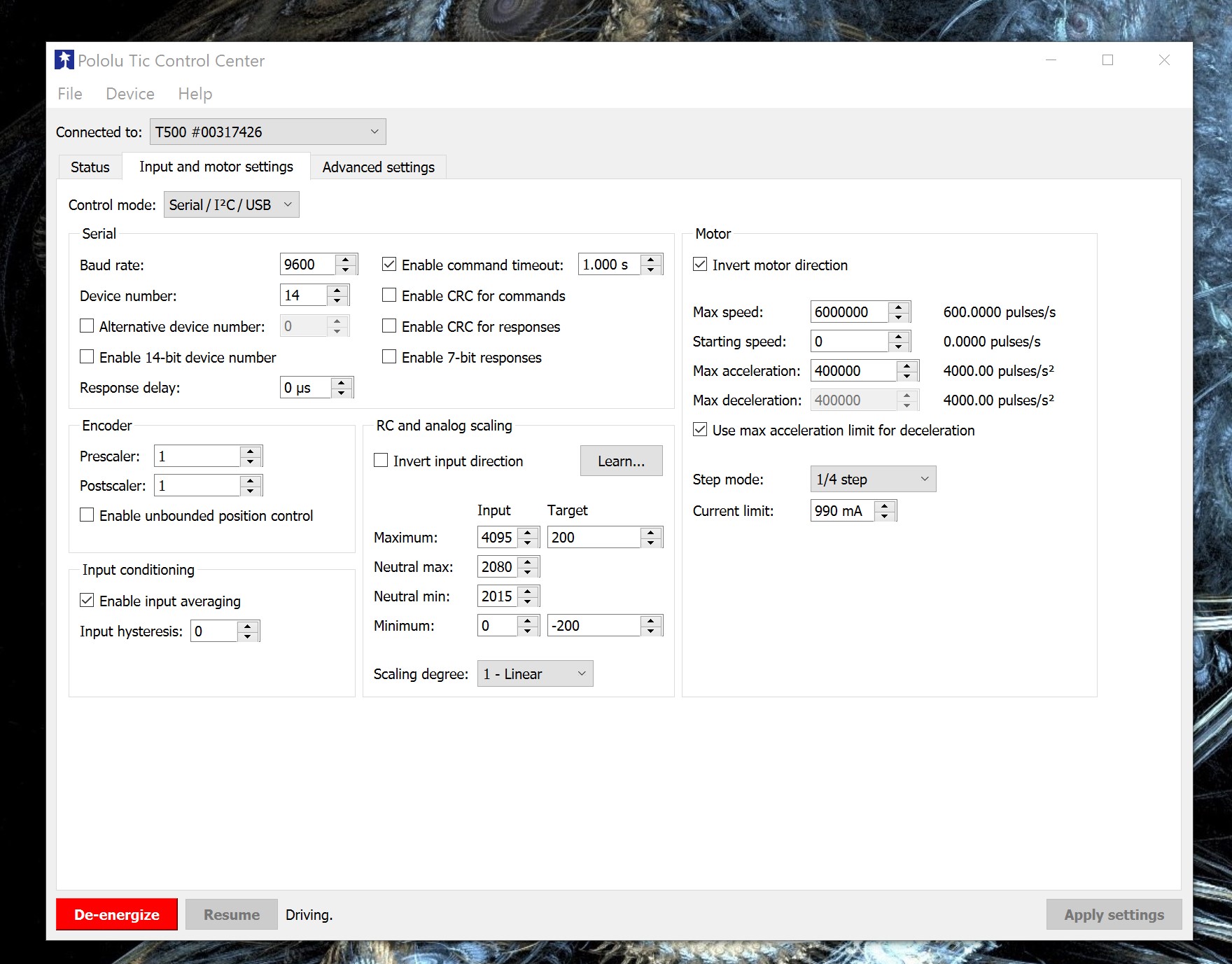
I am using the Pololu Tic Control Center and a Tic T500 both with the latest version of software and firmware.
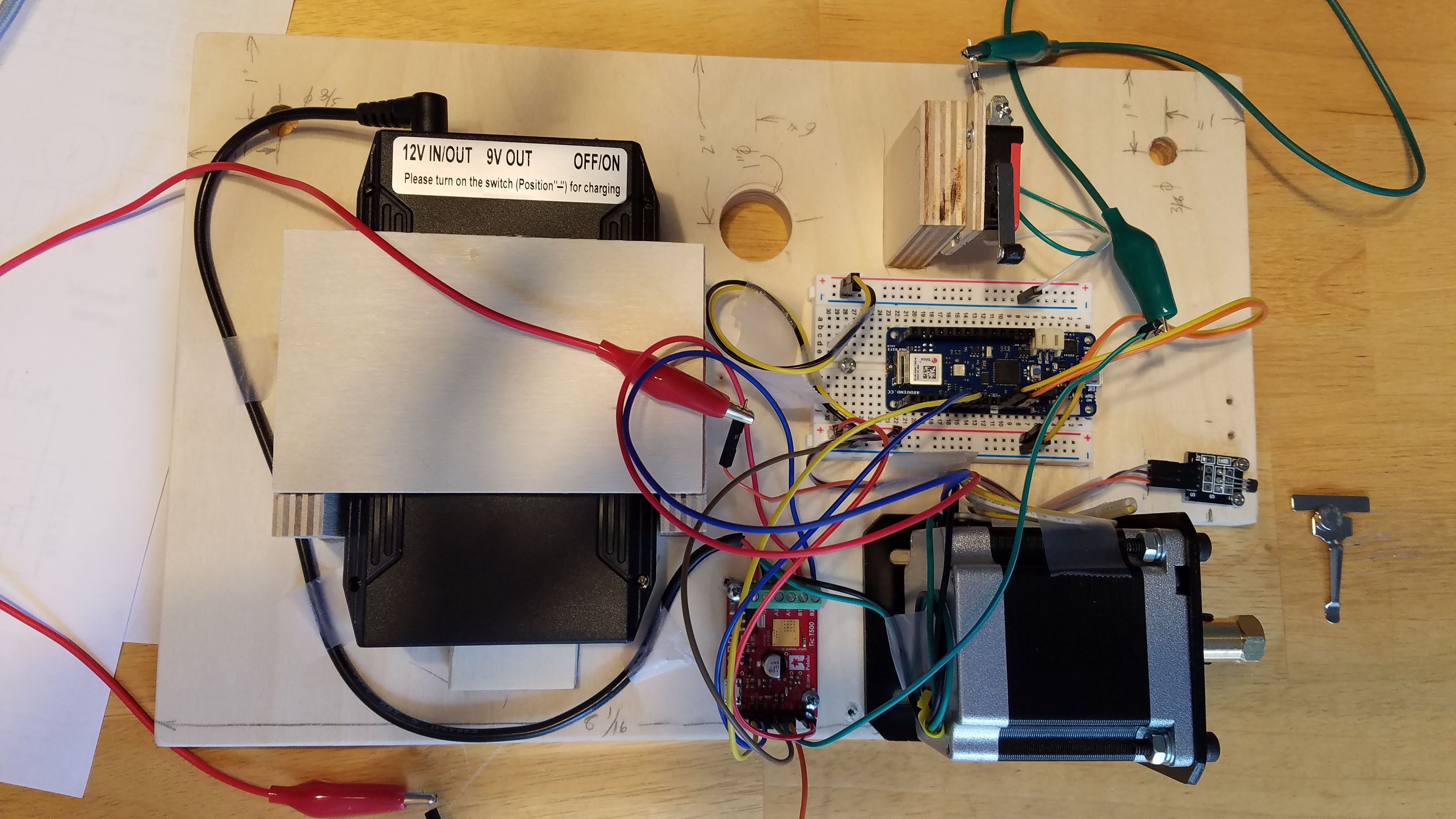
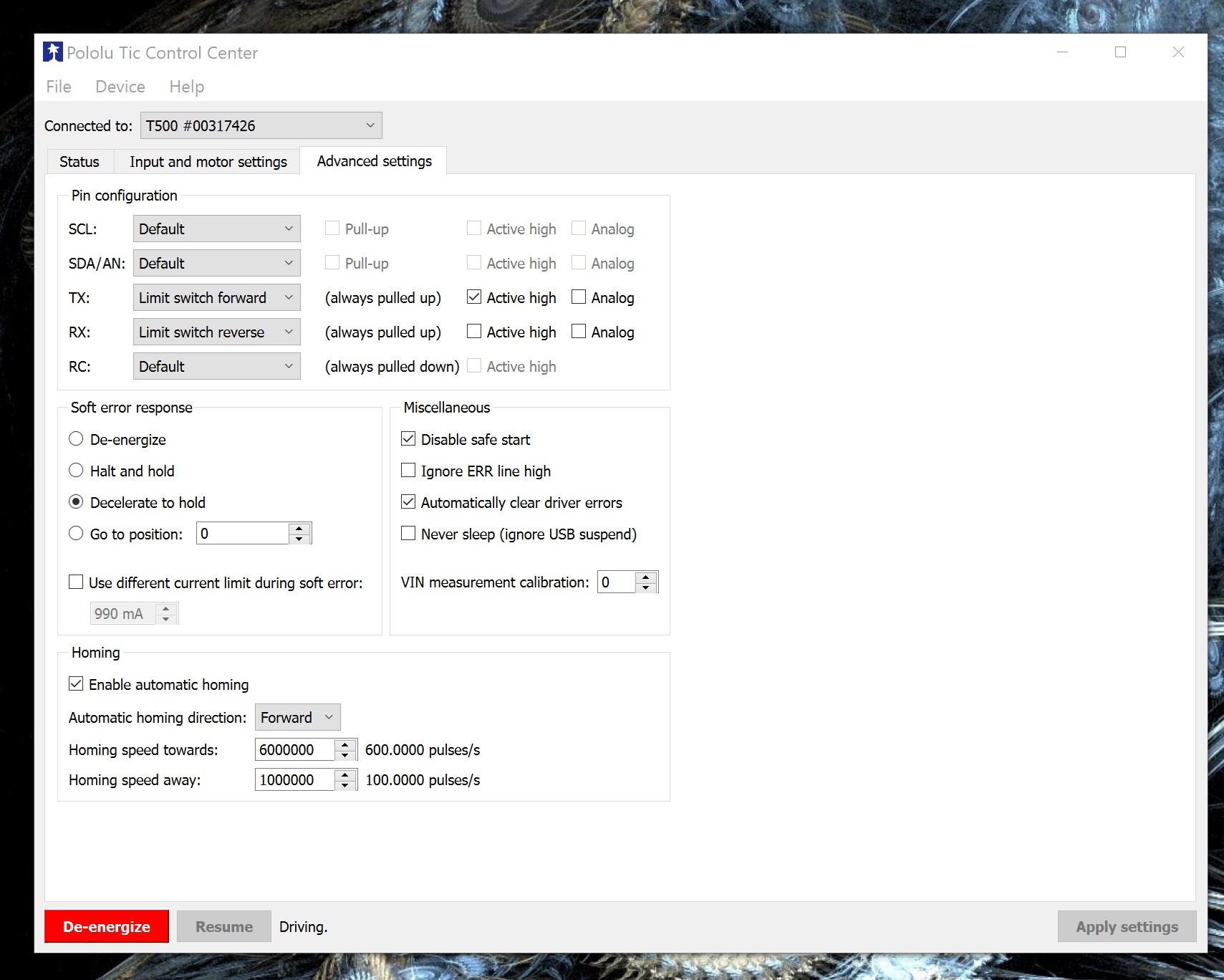
I have mounted the stepper motor (#1472 (SY57STH56-1006A)) along with the Tic T500 controller to a small piece of plywood that I mounted to the door. I have mounted a typical limit switch (for home Forward) to the plywood for the open sensor and a hall effect sensor (for home Reverse) mounted to the plywood senses a rare earth magnet imbedded in the door frame for the close sensor. I will attach a picture or two to help visualize the setup.
When I saw that the T500 included limit switch homing, I hoped that I could use these built-in functions to open and close the door. I will attach the relevant code to this post but essentially the logic I used was to first ensure that the door opens in the case of power-up as in a house power outage so I put a ‘tic.goHomeForward();’ command in the void setup section.
Then the switch code in the void loop section relies on a ‘doitNow’ variable which can be manipulated with the Arduino IoT Cloud (code for Cloud left out for clarity) to open or close the door.
Symptoms:
Once all this is hooked up and programmed and I apply power to the system, the stepper makes a bump sound that seems like it had the power applied then no movement whatsoever after that sound. Also I can turn the motor freely with my fingers.
Observations:
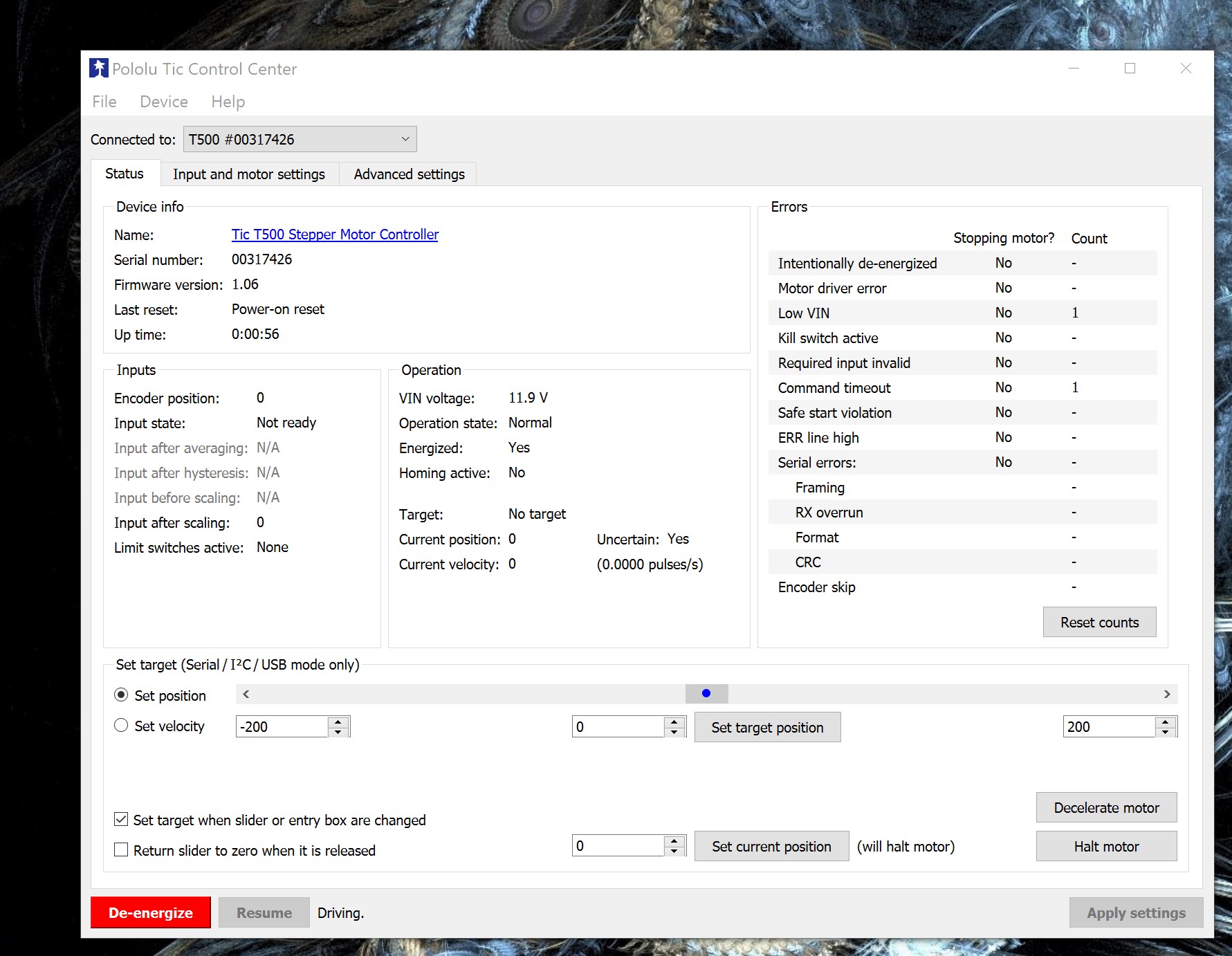
While plugged into the Pololu Tic Control Center I can cause the motor to run forward and the limit switch stops it and the Control Center shows the Forward limit switch activated. I can also run the motor in reverse and activate the hall effect sensor and likewise the motor stops. If I release/deactivate either limit switch the motor resumes running in its original direction until the limit switch is activated again.
I think the problem is in my coding as this is the first time I have used a TIC controller. The only thing I can observe in actual observation during testing is that after uploading the code to the Arduino and starting up the system I can move my USB connection to the computer over to the T500 and the Control Center indicates a Safe Start error which I thought the ‘tic.exitSafeStart();’ command in void setup would have taken care of already.
Photos: Note the Door Mounted ones show the former, smaller stepper motor


!
Screenshots:
Code:
// ....
// Tic - Version: Latest
#include <Tic.h>
TicI2C tic;
// Define the current limit, in milliamps, to use while moving
// the motor.
const uint16_t currentLimitWhileMoving = 1000;
// Define the current limit, in milliamps, to use while stopped.
const uint16_t currentLimitWhileStopped = 0;
bool doitNow = true ; // true is open it - false is close it
void setup() {
// Specify what type of Tic we are talking to. This affects
// how the setCurrentLimit command works.
// tic.setProduct(TicProduct::T825);
// tic.setProduct(TicProduct::T834);
tic.setProduct(TicProduct::T500);
// tic.setProduct(TicProduct::T249);
// tic.setProduct(TicProduct::Tic36v4);
// Set up I2C.
Wire.begin();
// Give the Tic some time to start up.
delay(20);
// Tells the Tic that it is OK to start driving the motor. The
// Tic's safe-start feature helps avoid unexpected, accidental
// movement of the motor: if an error happens, the Tic will not
// drive the motor again until it receives the Exit Safe Start
// command. The safe-start feature can be disbled in the Tic
// Control Center.
tic.exitSafeStart();
// open the door on power up
tic.goHomeForward();
} // for the void setup
void loop() {
delayWhileResettingCommandTimeout(1000);
switch (doitNow) {
case true:
// Set the current limit and wait a little bit for it to take effect.
tic.setCurrentLimit(currentLimitWhileMoving);
delay(10);
tic.goHomeForward();
tic.setCurrentLimit(currentLimitWhileStopped);
delayWhileResettingCommandTimeout(1000);
break;
case false:
tic.setCurrentLimit(currentLimitWhileMoving);
delay(10);
tic.goHomeReverse();
tic.setCurrentLimit(currentLimitWhileStopped);
delayWhileResettingCommandTimeout(1000);
break;
default:
// Optional
break;
} // for the switch
} // for the void loop
// Sends a "Reset command timeout" command to the Tic. We must
// call this at least once per second, or else a command timeout
// error will happen. The Tic's default command timeout period
// is 1000 ms, but it can be changed or disabled in the Tic
// Control Center.
void resetCommandTimeout()
{
tic.resetCommandTimeout();
}
// Delays for the specified number of milliseconds while
// resetting the Tic's command timeout so that its movement does
// not get interrupted by errors.
void delayWhileResettingCommandTimeout(uint32_t ms)
{
uint32_t start = millis();
do
{
resetCommandTimeout();
} while ((uint32_t)(millis() - start) <= ms);
}