I’d like to use the Tic 36v4 to control and drive a Nema 17 motor. After I set perimeters with the Tic Control Center software is it remembered after I disconnect it and turn power off?
The motor just needs to turn 100 revs./day any time I turn it on.
Also, please check my thinking:
400 step motor with 256 microsteps = 102,400 microsteps.
1/100 of a day is 861.64 sec.
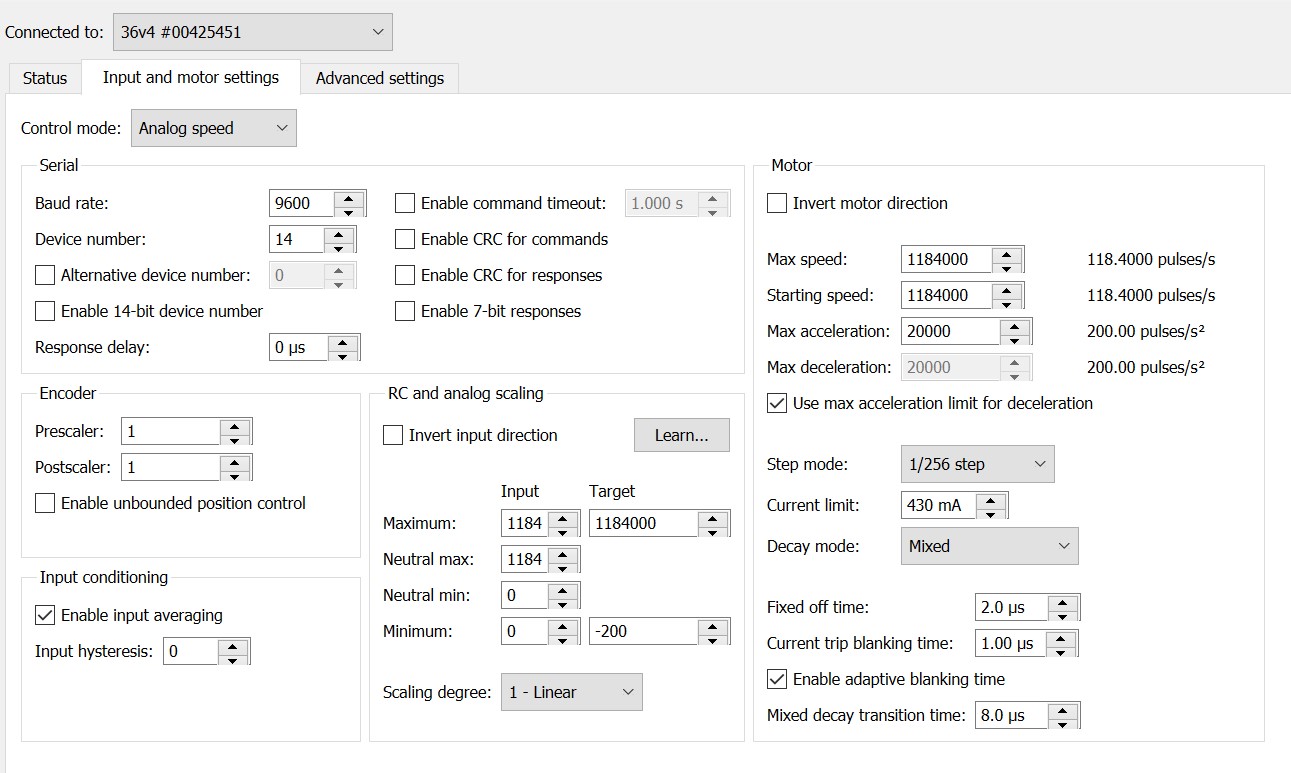
102400 / 861.64 = 118.84 pulses/sec. (starting and max. speed set in software)
Thanks, Joel
Hello, Joel.
All of the configuration settings detailed in the “Setting reference” section of the Tic user’s guide are stored in the Tic’s EEPROM memory and will persist between power cycles. Please note that this does not apply to something like the target speed.
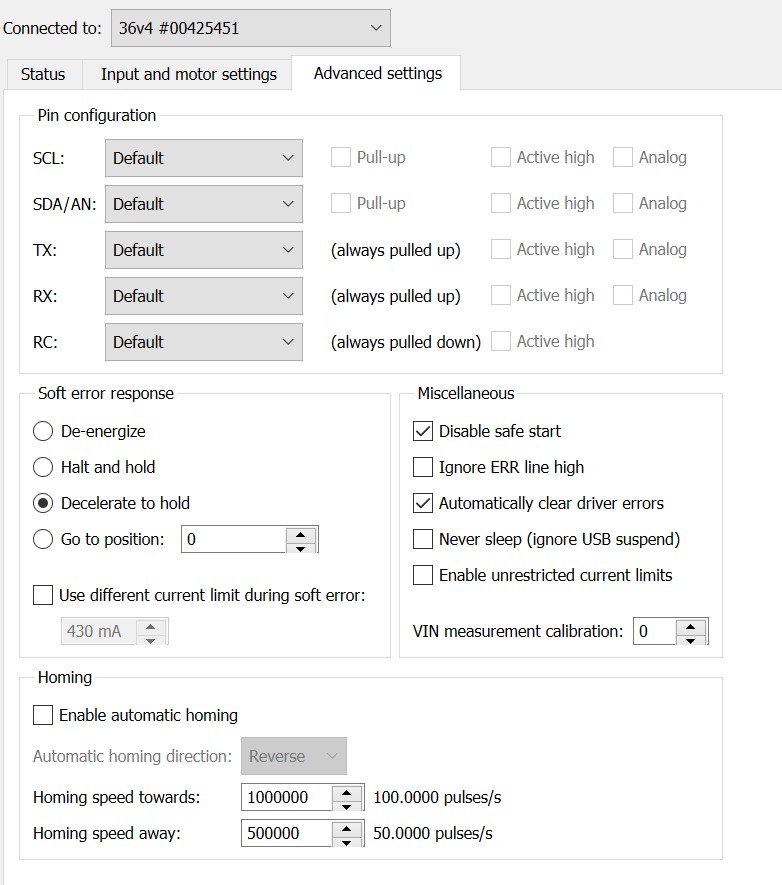
If you want the Tic to just drive the motor at a set speed whenever it is powered, one way to do that is to put the Tic in analog speed control mode and connect the analog input pin (SDA/AN) to the 5V pin so it always drives at your configured maximum target. Please note that you will need to disable the safe start feature as well (which you can do in the “Advanced settings” tab. If you try setting this up and have problems, please post a copy of your Tic settings file and I would be happy to take a look. You can save a copy of your Tic settings file from the “File” drop-down menu of the Tic Control Center while a controller is connected.
It looks like your step frequency calculation is correct.
Brandon
1 Like
Brandon-
Thanks for the help. My stepper is now moving at approximately the correct speed. Before I start changing the steps/sec. to get exactly 100 revs./day, would you suggest any changes to the other settings like acceleration, fixed time off, mixed decay transition time, etc.?
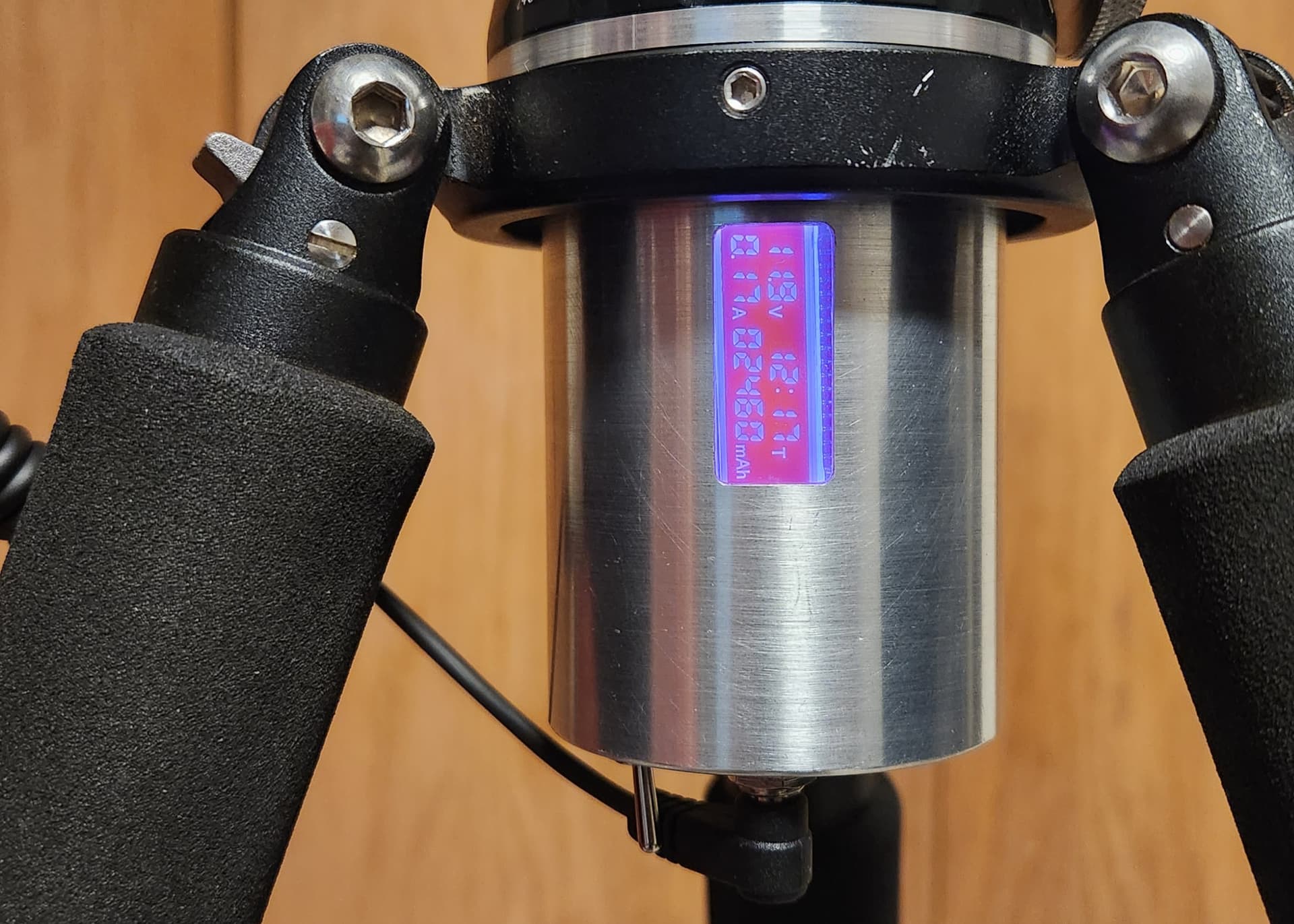
Also curious about the current limit set to 430 mA. I’ve got this little ammeter between the battery and Tic and it reads between 150 and 190 mA. I expected closer to the 430 mA limit. Is this typical?
Thanks, Joel
Since you still have plenty of resolution in the target velocity to work with, the easiest way to adjust the speed is just going to be by adjusting the velocity settings instead of the advanced settings you mentioned. Is your stepper motor 400 steps per revolution? From your current settings, I would expect you to get very close to 200 revolutions per day if your stepper motor is 200 steps per revolution (which is very common ). You can calculate this using your speed and microstep settings:
\frac{118.4 \frac{\text{pulses}}{\text{s}} × 86400 \frac{\text{s}}{\text{day}}}{200 \frac{\text{full steps}}{\text{revolution}} × 256 \frac{\text{microsteps}}{\text{full step}}} = 199.8 \frac{\text{revolutions}}{\text{day}}
It would make sense to get close to 100 steps per day if your motor has 400 steps per revolution; otherwise, if it is 200 steps per revolution, I would be concerned that it is missing steps. If your motor has 400 steps per revolution, you should be able to get closer to 100 steps per day by slightly increasing the max and starting speeds to 118.5185 pulse/s.
As far as the current, it is normal for the current draw from the power supply to be lower than the configured current limit. When powering the driver with a higher voltage than the stepper motor is rated for, the driver will actively limit the current by chopping the voltage through the motor’s coil (essentially running it at a lower voltage). The higher supply voltage you use, the less current it will need to supply to the driver (since Power = Voltage × Current).
By the way, please note that since your starting speed is equal to your max speed, the acceleration settings is not applicable as it will always be 0 (i.e. the commanded velocity will immediately take affect without any speed ramping). This isn’t inherently a problem, I just wanted to point it out so you know you don’t have to consider it in the speed calculations.
Brandon