
Hi.
I want to substitute a DC motor with quadrature encoder output signals with a stepper motor, getting somehow the quadrature signals. There are stepper motors with encoder signals, but by now I am not considering them. I use a Tic T500 controller in speed control mode, with R/C input. I assume pulses are not lost.
The T500 18F25K50 microprocessor should have internally the information for generating the direct and quadrature signals but, according to its pin configuration they are not available externally.
Examining with oscilloscope the T500 driving signals to the motor coils (at full mode at three different speeds):
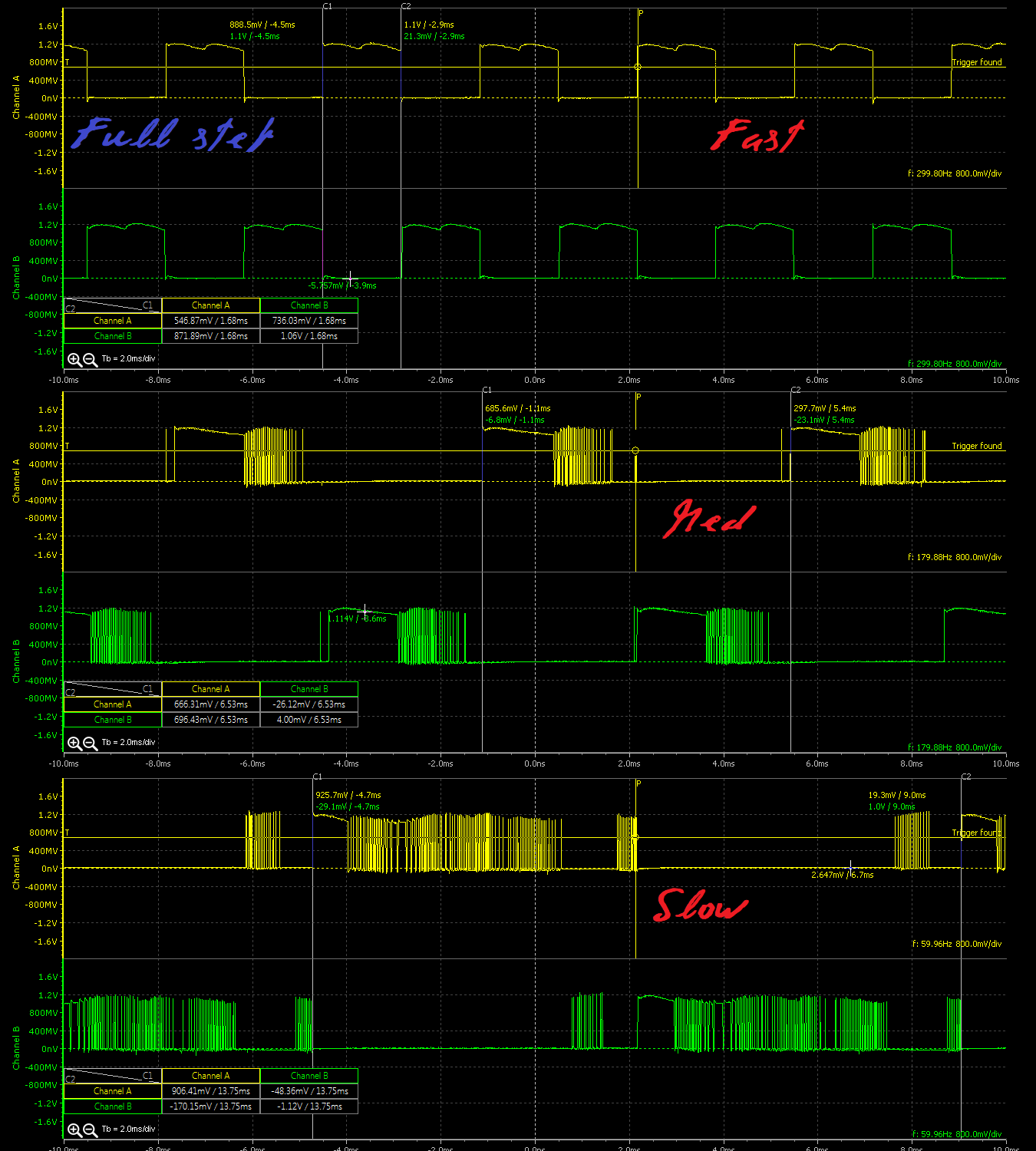
these signals are clean at high speeds, but unusable directly at other range speeds. At 1/2, 1/4 or 1/8 stepping modes the situation is worse.
With resistive dividers, they could be sampled with a microprocessor, say looking at high or low levels during more than 500 µs, and generate the quadrature signals accordingly. For two motors, there would be four inputs, and the microprocessor should generate four outputs, so a 14 pin ATtiny 24/44/84 or similar should be enough.
Is there a more simple way to generate the quadrature encoder signals from a T500 that I am missing?
Thanks for any suggestion.