I have an application where I’m using the micrometal gear motors to turn a knob. I need ~35 oz/in of stall torque to turn the knob and I’ve only got 6v of power to accomplish this. The 298:1 gearmotor works great for turning the knob.
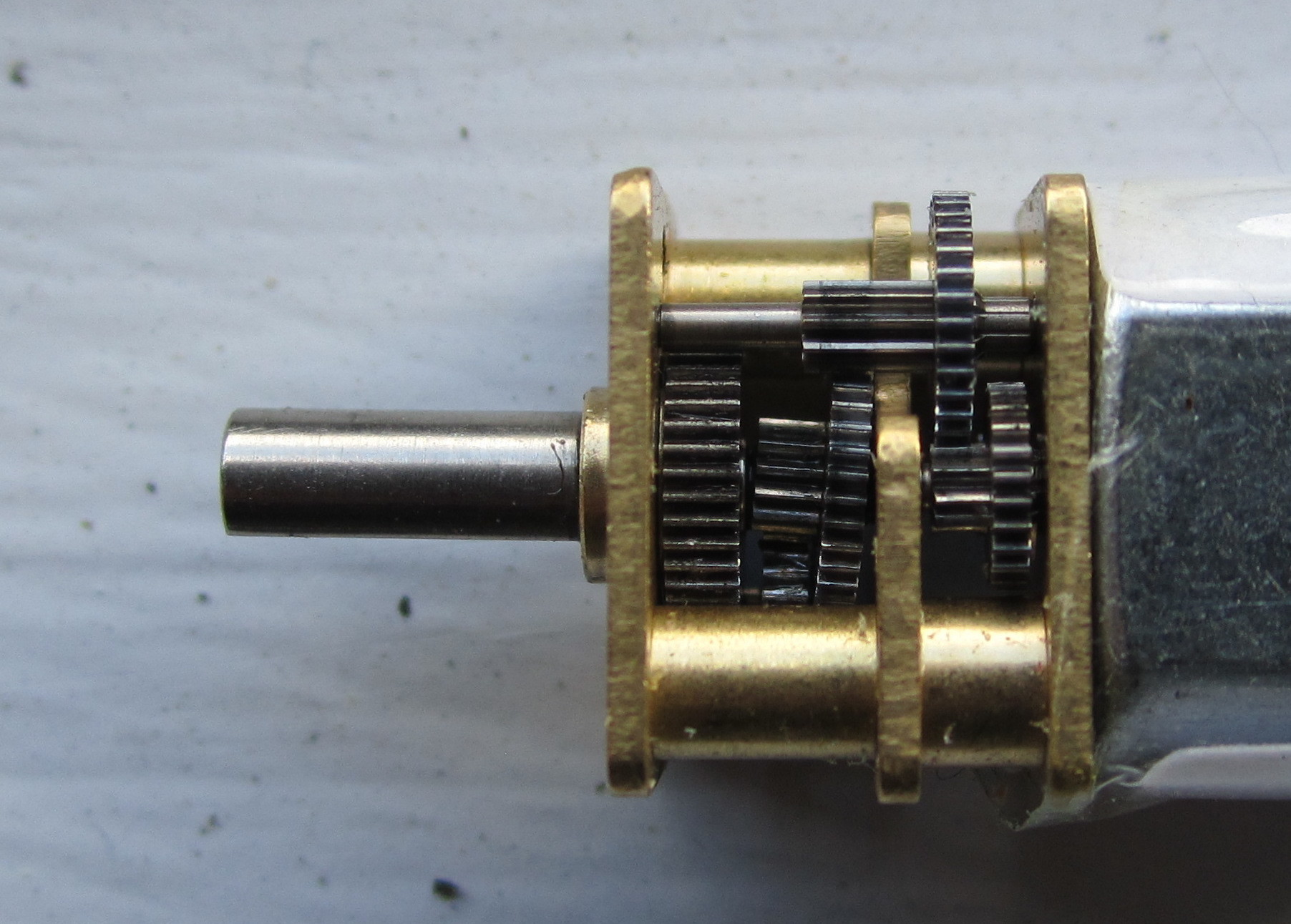
Here’s the problem. The knob can also be manually turned by a person. In some simple testing I’ve managed to destroy the gearbox on two motors so far. It appears to be a result of wear or catastrophic failure due to manual turning of the motor via the knob.
Questions:
Should I expect these motors at 298:1 to fail in this scenario?
The most common approach is to have a slip clutch on the gearbox output shaft. McMaster-Carr has them, at awe-inspiring prices. I’m sure you can do better! mcmaster.com/#slip-clutches/=typqwa
There are many DIY clutch options, though they might be harder to get quite right. A common slip-clutch is simply a rubber band on one option and another option. At a certain torque, it will slip! At another torque it will be find by friction. I would google “DIY slip clutch robotics.”
Personally I have used a stepper motor for door knob applications, because although bulkier I can easily deal with the problem you speak of (any slip clutch will take a decent amount of effort to implement for a 1-off job.) A stepper motor you just turn off power and it moves pretty easily, and even if you overtorque the shaft in any situation, it simply slips.
The problem with miniature slip clutches is that they aren’t “miniature” compared to the motor. I haven’t found any clutch online that will fit in the envelope I have available. I agree that those McMaster prices are impressive though.
We considered using a belt but as Tomek mentioned it’s likely going to be tricky to get the belt tension correct for our application. We also considered using a rubber wheel to transmit the torque (it would slip too) but it’s got the same trickiness as a belt solution.
I’m totally on board with using a stepper instead of a DC gear motor. However, I need to get about ~35 oz/in of drive torque and I can’t find a small stepper anywhere that will generate that type of force in a 20mmx20mmx30mm envelope. Maybe I’ve missed an option that someone else knows of?
Another option is a directionally racketing mechanism, since you don’t really need a slip-torque it seems, at least, you’re not concerned about torque limit when you’re intentionally driving the motor. Maybe you can find small ones for that?
NEMA 8 20x20x30mm, pololu.com/product/1204, seems like it’s rated for 180 g-cm, which is 2.5oz-In. If your application is a low duty cycle, you could run it with 50% overcurrent, and possibly get 3.5oz-in for short periods of time, but you would need to make sure you limit that time and hope that you haven’t reached magnetic saturation with the over-done current. You also want to do full steps (max current) and wouldnt run it too fast (sourcing at 6V for a 4.9V motor you have a strong inductance to work with, idk what the limit would be but I would guess no more than 1 rev/second). For context, the torque of the motor is proportional to the current in the windings, up until magnetic saturation (I don’t really know what that means except a little bit and practically that you cant just keep cramming more current an expect results.)
Also you’d have to hope that the rated torque is not overly generous. I don’t know much but I know between ratings Pololu motors are pretty consistent, that is, I used one motor that was 1/2 the rated torque with a 2/1 gearing ratio, and it stalled about at the same torque that the other pololu motor that had twice the rated torque. That was very weirdly worded by me, what I meant, was that there seems to be some consistency between the pololu motor ratings and that doesn’t mean their absolute value is accurate but encourages the possibility they might be.
That nema8 doesn’t look too farfetched if you have a small duty cycle. So I’m guessing the .6A current is continuous operation. Say you’re running .9A, you’ve increased the power losses by I^2*R, so 2.25X more. So I wouldn’t expect, at best, a duty cycle of more than 44%. I’ve made some simplifications on the power loss, but I think they’re reasonable. I would not rely on my reasoning though unless it makes sense with you, I’m just thinking it through out loud and seems reasonable rationale to me.