Hello,
I just ordered a DRV8825 that is on its way, and I just had a question about the I/O setup on the driver before I begin testing it on my stepper.
What exactly does the Sleep and Reset do when set to HIGH and LOW? What is Sleep and Reset? On most drivers, I’ve seen Dir and Step, but I would like to know if these other two signals are required to hook up to the pins on my Arduino (I’d like to maximize my number of digital PWM pins). If I do not set Sleep to HIGH at correct times, does that harm my motor? When do I call changes in Sleep and Reset?
Thanks so much,
Colton
Hello.
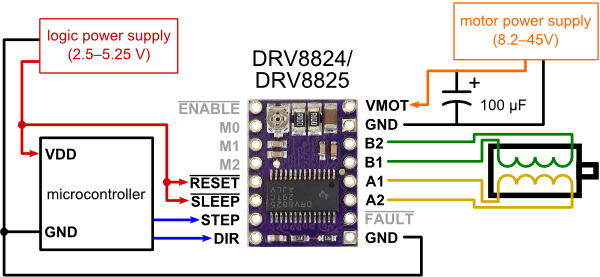
When pulled low, the SLEEP pin puts the diver in a low-power sleep state, and the RESET pin resets the internal logic. Pulling either pin low will disable the H-bridges. More detailed information about the SLEEP and RESET pins can be found in the DRV8825 datasheet, which is located under the “Resources” tab of the DRV8825 product page. You will need to pull both pins high to be able to drive a stepper motor. If you want to control the power states of the driver, you can connect them to digital Arduino pins to be able to pull them high or low, but if you do not need to control these power states, you can simply tie them high as shown in the minimal wiring diagram.
-Brandon
Thanks for the documentation Brandon that clarified all of my concerns!

{kind=link}