Dear All,
a I’m a newby with Pololu Actuators. So my idea is to design a mechatronic simulator of a chest wall composed by 8 panels.
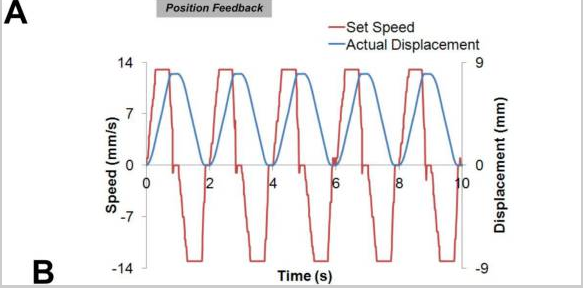
Each panel should move with a specific displacement pattern at the same moment, with a defined target displacement and speed time per time.
I selected:
8 x #2303 Concentric LACT2P-12V-20 Linear Actuator with Feedback: 2" Stroke, 12V, 0.5"/s
8 x #1394 Pololu Jrk 21v3 USB Motor Controller with Feedback (Fully Assembled)
I would like to control actuators by daisy-chain technique by arduino controller connected to each Motor Controller.
I would like to record with another DAQ each feedback from each actuator (potentiometer) time per time in order to say position in each instant.
I have read the guide. So I know that daisy-chain technique is realizable. But I don’t know if is possible to record feedback. And to set defined target displacement and speed time per time.
In the attached image I show you the desired displacement and speed profiles to realize.
Thanks to all.
Hello.
You should be able to use a separate device (like a DAQ) to record the feedback by splitting the signal from the potentiometer so it goes to both devices. The jrk also has serial commands for reading the feedback value, so an alternative option might be to write a program that logs the feedback.
From your description, it sounds like the target displacement you mentioned is the same thing as setting the target value. If you are using serial commands, there are multiple commands you could use. You can find details for these serial commands in the “Motor Control Commands” section of the jrk controller’s user’s guide.
When using analog feedback, the jrk uses a PID control system to move the actuator to the set target value, so with well turned PID constants, the actuator should move to the target position as fast as it can. You can set a duty cycle limit to reduce the maximum speed of the actuator, but configuration settings like this one are saved the jrk’s non-volatile memory, which has a limited number of erase/write cycles and is not meant to be changed on the fly, so you could not use this feature as the speed control you described. Instead, you would probably need to write a program that sends commands rapidly to change the target and make it move in a particular way.
-Brandon
