If I install two metal gear motors with encoders back-to-back, inline with each other, what minimum spacing if any do I need to allow between their rear ends to prevent interference between the magnets and hall-effect sensors?
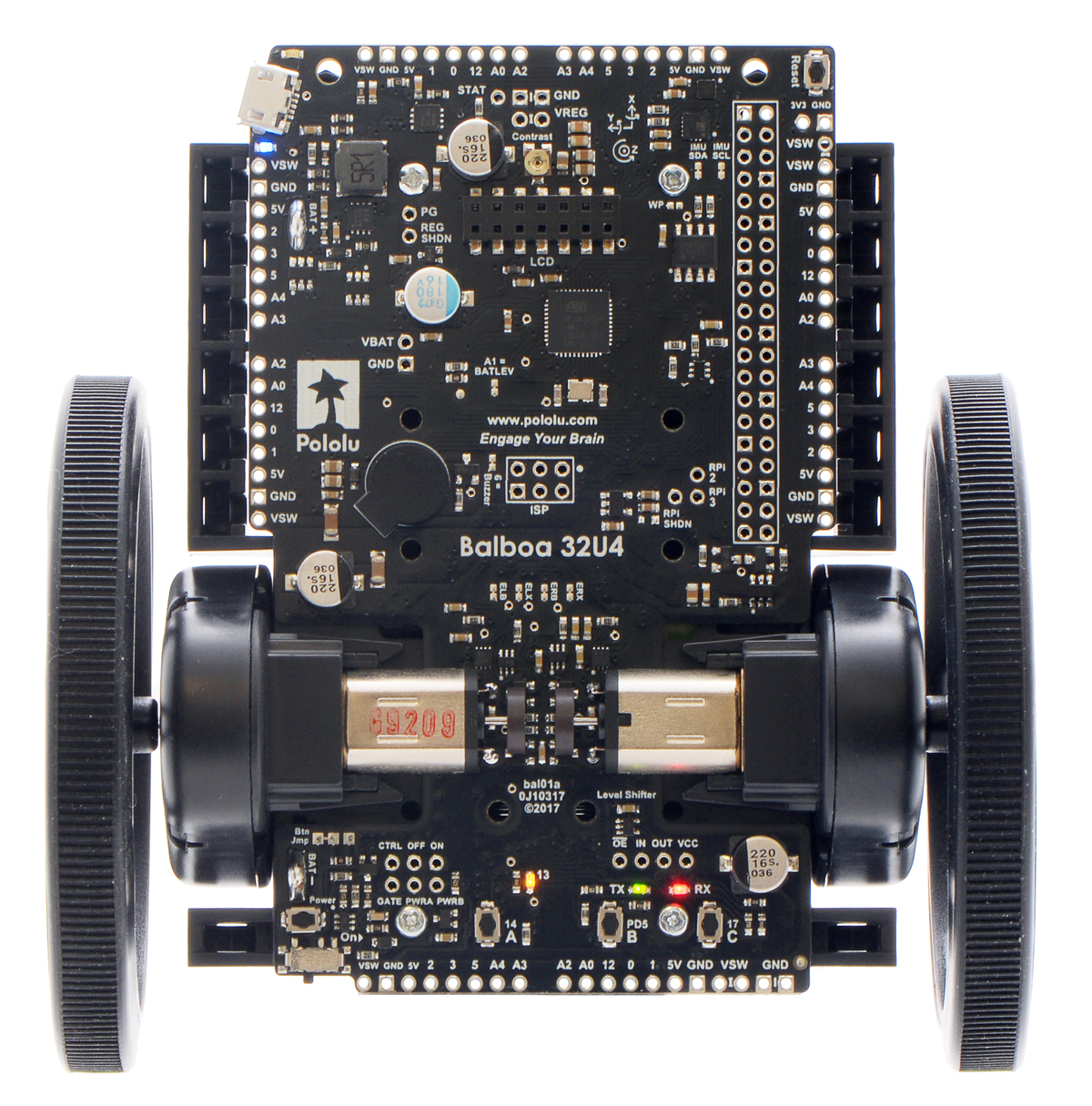
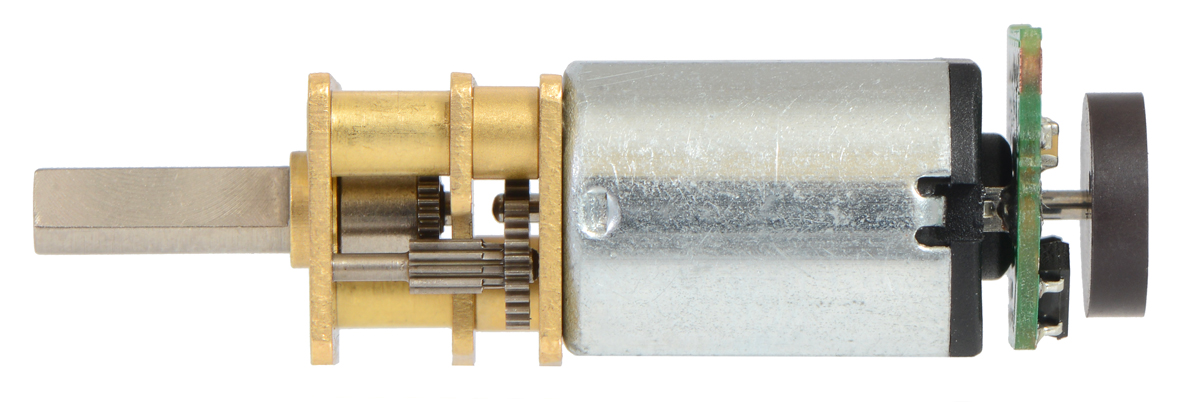
We do not have an exact minimum for any of them, but we use about 4mm of separation (at the back of the encoder disks) for our Balboa robot, which uses our micro metal gear motors. Also, the hall-effect sensors on those are on the PCB next to motor; the sensors on our dedicated encoder boards sit between the encoder disk and the motor.
Our 25D and 37D metal gear motors use different hall effect sensors and encoder disks, so the characteristics might be different.
That sounds promising. But the motors I have ordered are the 25D 47:1 motors which are larger. At 63.5mm long each, and allowing just 10mm between them, makes for a minimum chassis width of 140mm. When they arrive in a few days I plan to conduct an experiment, driving one motor at a constant speed while observing the encoder output of the other to see at what distance it might pick up spurious signals. I will delay cutting the chassis material until I know the safe spacing.

{kind=link}
{kind=link}