Generally, a gearmotor drawing 25% of the its stall current will correspond to it applying 25% of its stall torque at 75% of its free run speed. (There is an inverse relationship between torque and speed.) However, if available, the ideal resource for assessing this is the motor performance curve which shows the relationships between a motor’s torque, speed, current, output power, and efficiency.
Unfortunately, we have not a datasheet for our 25D gearmotors yet, but do not worry, those are coming! In the meantime, if you need performance curves for one of our 25D gearmotors, please email us at support@pololu.com, and we might be able to get you preliminary data for a particular gearmotor.
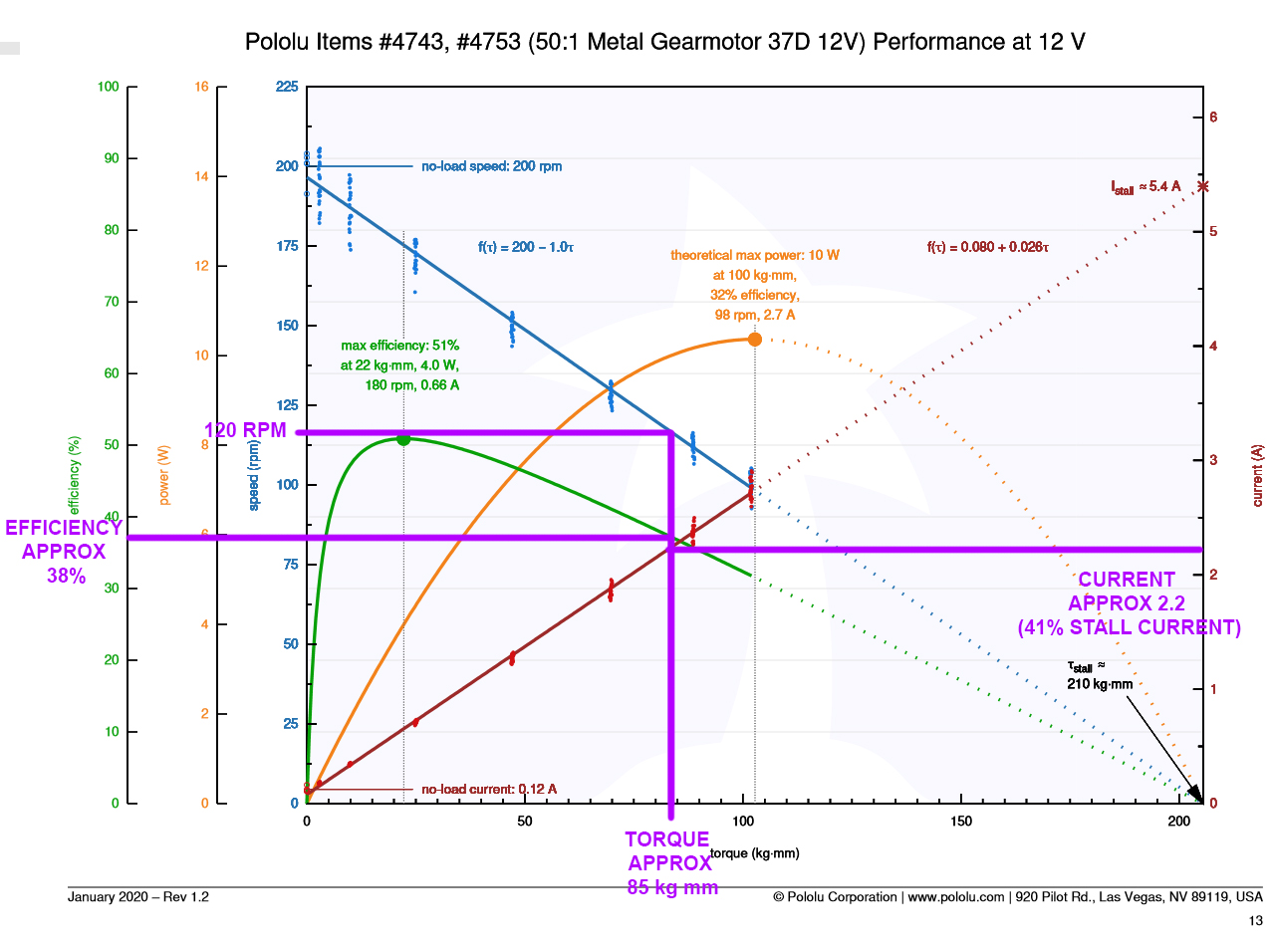
Thank you for your reply, which in combination with the performance curves has [ I think ] given me a better understanding. I cannot find something that matches my original spec. However, if I adjust my mechanism, I can adjust the RPM and torque requirements as follows:
RPM = 120
Torque = 70 kg mm
Note: The device would accelerate to speed, then run continuously (essentially a turntable with uniform weight)
I have selected the following motor #4743 and drawn over the graph (attached)
This provides me with the required RPM and a little extra torque. However, I would be running at approximately 41% of the stall current.
Questions.
Is that 41% of stall current a disaster?
The graphs have solid and dotted lines. Is there some significance? (there must be !)
It seems logical that the load on the motor would reduce once I have accelerated to speed. I’m not sure how that is relevant, but feel that it is.
Operating continuously at 41% of the stall current is not recommended, and it will likely shorten the lifetime of the motor. If this is what you need to get the performance your require, that is probably a sign you should be using a higher-power motor.
Our next higher gear ratio version of that motor, the 70:1 Metal Gearmotor 37Dx54L mm 12V (product #4744) might be a better fit for your application. It would run a slower at your 70kg•mm load (maybe around 110rpm instead of 120rpm), but the current draw would be closer to 25% of stall. If you expect the 70kg•mm to just be your maximum load while the motor is accelerating, then it might still be able to run at 120rpm once it is up to speed, though at that point you might need an encoder (or some other velocity feedback sensor) and an appropriate closed-loop speed controller (like one of our G2 Jrks or Roboclaws) to ensure you maintain that speed.
In our motor performance curves, the solid lines show the regions where we actually took measurements while the dotted lines show extrapolations beyond that. For many motors, we took measurements out to about 50% of the stall torque, since continued operation at loads past this point increasingly risk thermal damage to the windings. However, for higher gear ratios, going to 50% of the stall torque exceeds what is safe for the gearbox, so the measurements are further limited to not much past our recommendation for continuously applied loads.