Hey Jackel,
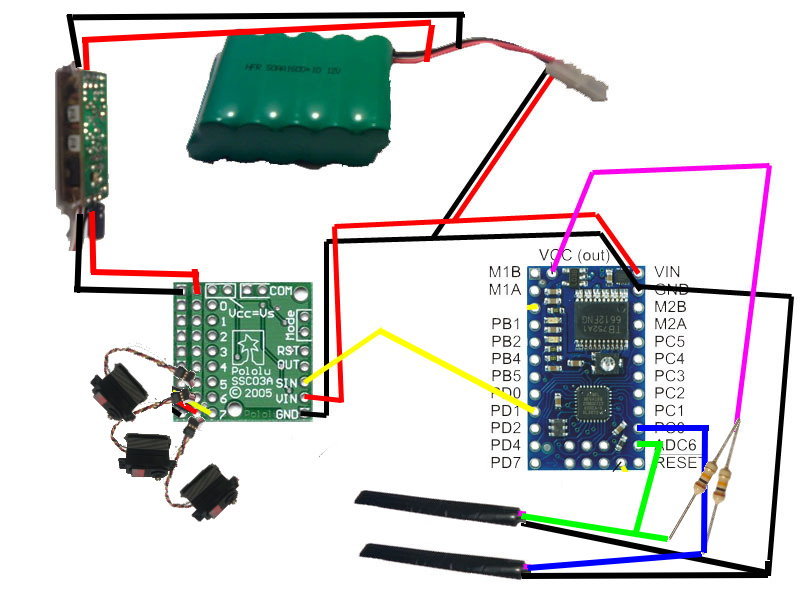
I feel your pain. A lot of core engineering curriculum isn’t applicable in the real world by itself. That why it’s always good to fool around with actual, physical projects, like you’re doing now! I’m a little confused though, do you mean you’re building two identical systems each consisting of one bend sensor, one Baby O, one servo controller, and one servo? Where does the third servo go?
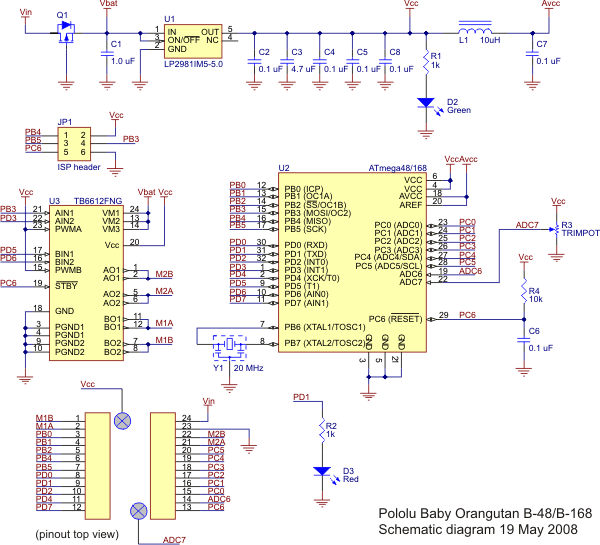
Can you give some more specifics about (or just the model of) your bend sensor? I’m guessing it has an analog output, which means it will need to be connected to one of the analog input pins. Lets take a look at the Baby Orangutan schematic from the user’s guide:
Pin names and function abbreviations are shown on the ATMega168 box in the schematic, and you need to pick an ADC pin (Analog to Digital Converter). The ADC6 pin would be a good choice, as it does nothing but analog input, but any of the PORTC pins (named PC#) will also work. Depending on the sensor you may also need to pair it with a resistor, but since you show it with three leads I’m assuming it is set up as a voltage divider already.
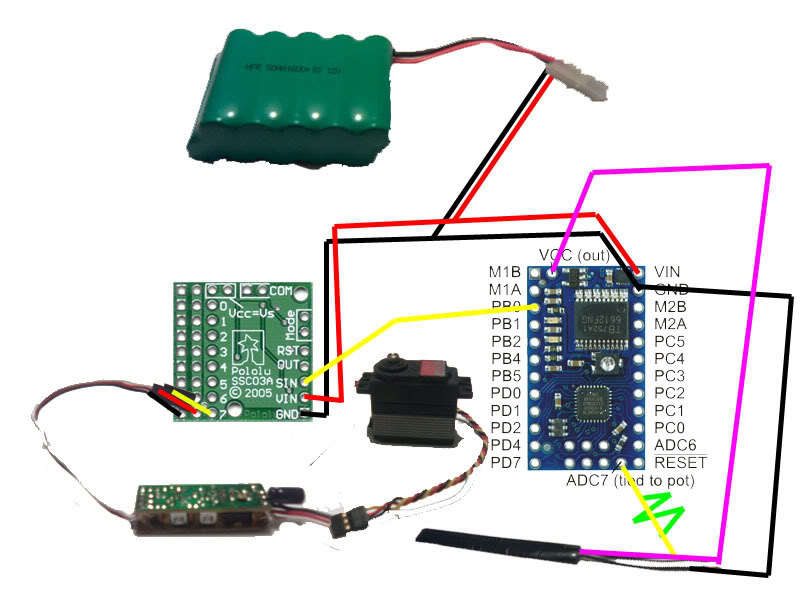
Serial bytes are just timed high/low pulses, so you can generate them in software on any I/O pin you like, but the ATMega168 microcontroller also has built in serial hardware, called a USART (Universal Synchronous and Asynchronous Serial Receiver and Transmitter) which makes things much simpler. Essentially in your code you will be able to say “transmit this” rather than “I want to transmit this, so bring this pin high, pause for this long, then bring it low, then pause for this long, then etc…”. The transmit pin (TXD) for the USART is PD1, so you’ll want to connect that to SIN on your servo controller.
Can you tell me more about your battery pack? You can find cheap little LED power bar things for most battery types. The Baby O and the servo controller can take 12V, but that would probably damage the servos, which are only designed to run between 4V and 6V. The servos have a separate power bus, so you can run them off of a 6V battery pack. Actually, you can run everything off of a 6V battery pack if you like, are you stuck with the 12V pack? Servo motors take a lot of current, so powering them through regulators isn’t a great idea, but it can be done, especially if the servo won’t be working hard (i.e. stalling).
Finally, did you happen to also pick up an AVR programmer, like this one from Pololu or this one from ATmel perhaps? You’ll need one to download programs to your Baby O. It’s one of those things you have to buy once, but then you can use it forever.
-Adam
P.S. While a separate servo controller makes things easier, you can generate servo control signals directly from the Baby O. It gets complicated when you want to control many servos, but it’s not too bad for just one or two.