Hi - I’m looking at using the VNH5019 Motor Driver breakouts (7 of them) on a model train layout. I have worked out most of it using a Pololu MC33926 but have been told that I can’t run two of these in parallel for fear of shoot through issues.
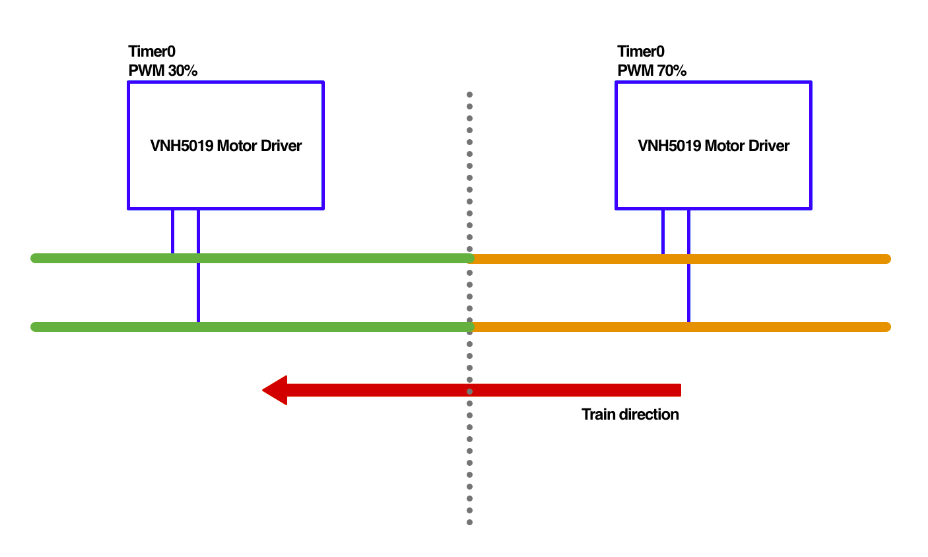
The picture below shows where the problem for me lies:
If a train running right to left is being PWM controlled on the orange tracks by one VNH5019 at 70% duty cycle, and crosses over on to the green tracks being PWM controlled by a second VNH5019 at 30% duty cycle (% numbers are arbitrary) what will happen ? Both of the VNH5019 IC’s are run on the same MCU hardware Timer0 so the PWM signals are in sync.
One suggestion is to put the left VNH5019 outputs in high impedance mode until the train is confirmed to have left the orange tracks (not sure how I do this) and then, between a PWM cycle, enable the left PWM outputs and put the right VNH5019 outputs into high impedance mode.
The trains have two motors that are driven by contacts in the wheels. Front wheels have one motor and rear wheels have a second motor - both motors are connected in parallel. This means that when the front wheels cross over the orange / green boundary the two tracks are essentially joined by the front / rear motor parallel wiring.
By using the current sense pin on the VNH5019’s I may be able to detect when the train has left the orange VNH5019 and then take the green VNH5019 outputs out of high impedance - I am running the PWM timer at 20kHz which gives me less than 50uS to detect the 140mV/A change and then take VNH5019 outputs out of high impedance.
Am I still in the territory of shoot through issues ? Could I do this with the MC33926 devices or is this considered “paralleling” and thus require the VNH5019 ? I already have 1 Pololu MC33926 board and don’t want to waste it !
Can someone from Pololu help me out here ? I want to place an order for 7 of these motor drivers and need to know if what have asked above will actually work.
Concerns about shoot through will apply to any H-Bridge drivers that are put in parallel. Even when the two H-Bridges are supplied with the same control signal, shoot through can still be an issue since the two drivers might take different amounts of time to respond to the signal and to turn off and on their MOSFETs.
In the case of the VNH5019, the chip was designed to be able to be paralleled and the datasheet gives recommendations that suggest connecting both channels from a single driver chip together. That is not the way the drivers would be connected in your train set up, and there is no way to connect the drivers like that and still control your 2 tracks independently, so switching to the VNH5019 will not remove the shoot through concerns.
You might be able to do something with current sensing to detect when the train is no longer powered, but since the speed of the train and the current through the motor coils are directly related, the train would probably have to slow down significantly for you to detect the change.
If this kind of transition is something commonly done in model train setups, it might be useful to look for a model train forum to see what others have done and get advice.
I don’t know if it is commonly done but not having much luck getting advice elsewhere.
Just to point out, I’m not trying to get two motor drivers to supply more current to one motor.
This is about a motor crossing over from one PWM motor driver to another.
If I go back to the MC33926 drivers that can put their outputs into high impedance mode (tri-state outputs) could I tri-state one side and when the active side current sense drops to zero, tri-state it’s outputs and activate the other driver’s outputs within the PWM off segment (50uS in my case at 20kHz)
If you could detect when the train is about to start straddling the two tracks, changing one track to tristate (coast) would mitigate the concerns about shoot through.
You might be able to do that by measuring the current through the second track and seeing when it jumps up (meaning the train has made contact with it). That would expose the drivers to a little risk.
A safer way would be to add another sensor, like a proximity sensor, that detects when the train reaches a certain spot on the tracks.