I was wondering if any extra capacitors were necessary to use the Qik2s12v10 driver with 12V batteries, & stall current per motor should be around 6A. If there is, where would I solder them? I would assume at least ~250 uF would be necessary, as the motor driver ( VNH2SP30) datasheet states that 500uF for every 10A is the minimum recommended amountI have searched on the documentation and online and weren’t able to find any information. I assume that the middle two sets of holes are for capacitors, but I am not 100% sure. Can anyone clarify? Thanks!
It is hard to say for sure what extra capacitance will be needed for an application without testing it. There are already two 56uF capacitors on the board. It seems like that qik 2s12v10 should be able to easily handle the current draw of your motors, so you might not need extra capacitance. If your motors are particularly noisy or your power supply is far from the controller, you might get better results with several hundred micro farads extra. In general, it usually doesn’t hurt to have extra capacitors, so if you want to be safe, I would err on the side of more capacitance.
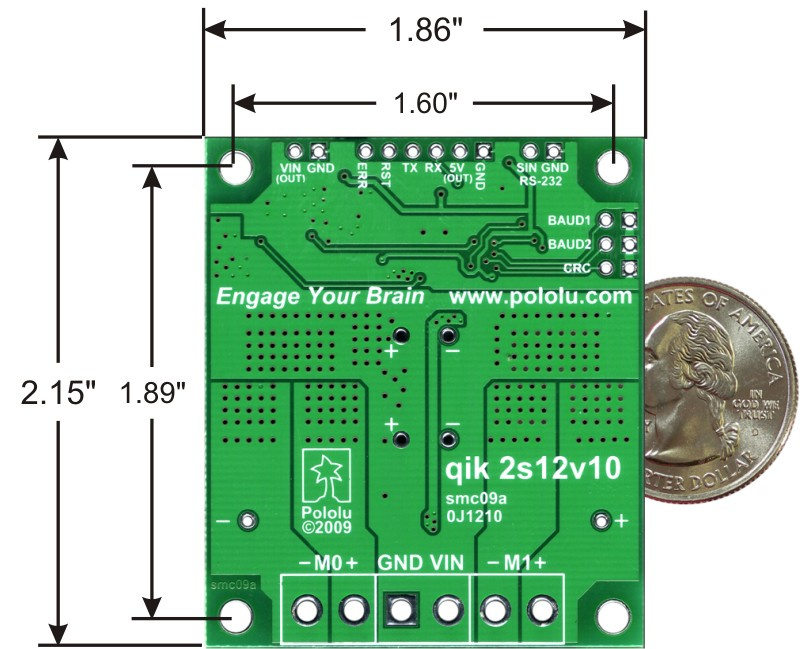
Thanks for the information. If I were to install new capacitors, where would I install them? Would I install them in the two sets of holes on the back end of the driver, or would I have to desolder the 56uF capacitors to replace them? The documentation unfortunately does not mention that, so I would like to clarify before I potentially break more drivers. Thanks!
You can connect them to the extra through-hole pins labeled + and - on the board or across VIN and GND close to the board.
It sounds like you might not be sure what happened when you broke some of your qiks before. If you would like help troubleshooting, please post details of how they failed and pictures of your setup.
And I didn’t break any qik’s - I broke a couple high power G2 drivers, presumably due to using too low of a capacitance or incorrect grounding. I made a post about it here : 2 Pololu G2 High Power Motor Driver failed - Any advice would be appreciated. I haven’t pinpointed a solution yet, but since getting the robot back up and running ASAP is a priority due to a sponsorship event happening soon, our team is planning to get the motors up and running at a lower voltage using these drivers for the time being (these are our older drivers from back when we used a lower voltage motor).