Using a jrk motor controller with a linear actuator with feedback
Hello,
I’am a meccanical engineer in PhD studies and i work at a laboratory of the University of Cassino and Southern Lazio in Italy.
We recently bought a Pololu linear actuator with feedback, 4 Stroke (LACT4P and a Pololu jrk 21v3 USB motor controller for a robotic project of a prototype walking and Wall Climbing biped Robot.
pololu.com/picture/view/0J1594
Pololu jrk 21v3 USB motor controller with included hardware soldered in (fully assembled)
Concentric linear actuator with feedback and 4" stroke (LACT4P).
To connect the linear actuator with the feedback to the jrk 21v3 motor controller I used the steps below : (from your web page : pololu.com/catalog/product/2319)
1 read through the Jrk USB Motor Controllers User’s Guide and download its drivers and configuration software.
2 Connect your jrk to a PC with a USB cable and launch the configuration utility. The red LED should be on, and the green LED should be flickering quickly.
3 Download the jrk 21v3 settings file for use with LACTxP (1k txt). The settings in this file work with any length actuator that has a feedback potentiometer (model LACTxP), and they were tested on the jrk 21v3, which is powerful enough to drive these actuators in typical applications. These settings should also mostly work for the higher-power jrk 12v12, though a few of them (e.g. current calibration) might need to be adjusted.
4 In the configuration utility, choose File → Open settings file (Ctrl + O), and navigate to the location of the settings file you downloaded in step 3.
5 Click on the PID tab of the configuration utility and verify that the proportional and derivative coefficients are not zero. If they are zero, the settings file was probably not loaded properly and you should try performing the previous step again.
6 Click “Apply settings to device”.
7 With your power supply off, connect your linear actuator to your jrk using the connections shown in the picture to the right. The picture shows a jrk 21v3, but the connections will be the same if you use a jrk 12v12.
8 Turn on Power.
9 On the Error tab, choose “Clear Errors”. The “No power” and “Feedback disconnect” errors will clear. The red LED will turn off, and the yellow LED will blink slowly.
10 On the Input tab choose “Set Target” to move your actuator to the target position.
pololu.com/picture/view/0J3409
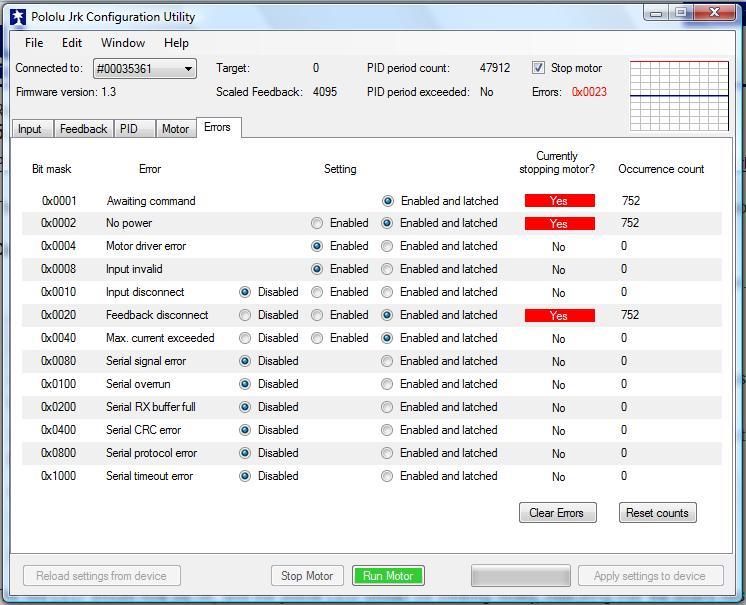
From step 1 to step 8, we had no problems. And when at step 8 we turned on the power supply for the first time the linear actuator shaft fully extended but stopped and the sotfware jrk configuration do not anymore clear the errors:
0X0001 Awaiting comand
0X0002 No power
0X0020 Feedback disconnect
And now each time we turn on the power supply the actuator dosen’t works anymore.
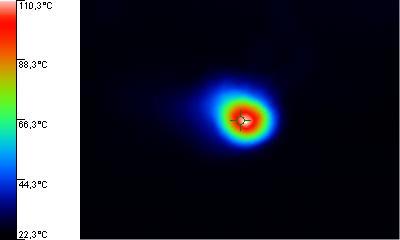
We took a thermal photograph of the jrk controller card with the power supply on and a component seems to warm up.
Is there a procedure to reset and test the jrk controller? Does the card controller has a problem?
Can we test the actuator without the jrk controller?
hoping that someone could help me to resolve the situation, I’ll stay waiting for ar reply.
Thanks.
upload image of errors jrk pololu controller