
I’ve tried to post this question in the Roboclaw forums but I get no indication if the post went through.
I’m currently trying to read the encoder position from a roboclaw 2x7A, encoder used is Pololu item #: 2590 micro optical pair. within the ION software everything seems to work fine the encoder position count seems to go up or down as expected and the pair remains as close as I would expect.
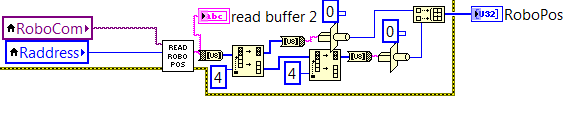
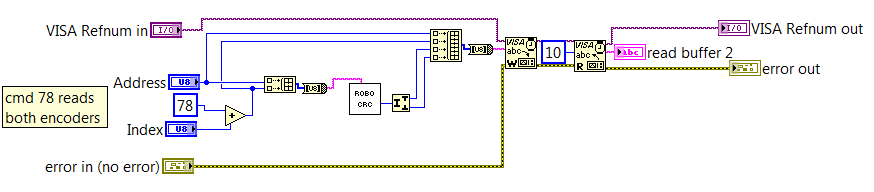
the problem is when I pull the position reading within labview the values seem to only update when the motors are moving as expected and when moving start out as expected but after a few seconds the values returned become erratic and jump all over the place.
ill post some snippets of my code and if any other information is needed just let me know.
thanks guys