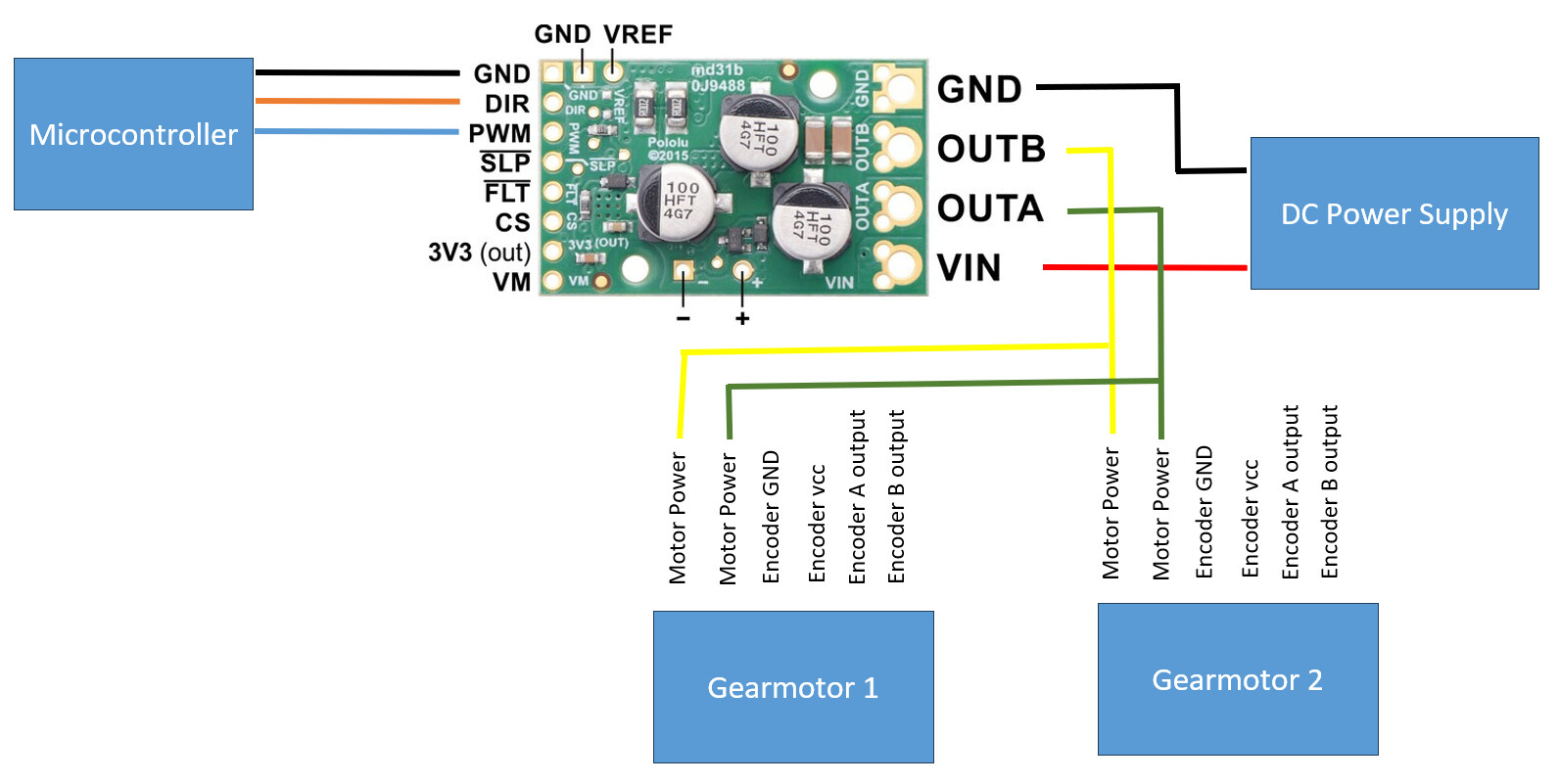
Hi, I’m using the Pololu G2 High-Power Motor Driver md31b to drive 2 of the Pololu 150:1 Metal Gearmotor 37Dx73L mm 12V with 64 CPR Encoder. The specifications state that the G2 High-Power Motor Driver outputs 21A when supplied with 6.5V to 40V. I observed that increasing the voltage results in a faster RPM for the gearmotors, contrary to my expectation of a constant RPM due to a constant 21A output.
I have been using the motor driver and gear motors to move quite a heavy load and there have been occasions of motor stalling which I resolved by increasing the input voltage of the motor driver to increase the gearmotors’ rpm. The gearmotors are rated for 12V and I would like to ask if the output current of the motor driver is a constant 21A or if it is dependent on the input voltage as I do not want to negatively affect the lifespan of the motor.
H-bridge drivers for brushed DC motors, including our G2 High-Power Motor Drivers do not output constant currents. They output a voltage that matches the operating voltage and duty-cycle being applied to them, and the motor will try to draw current depending on its characteristics (resistance, inductance, inertia, etc.) and attached load.
Along the same lines, your motor increasing speed when you increase the voltage supply is expected behavior. Increasing the voltage while the other characteristics of your setup and motor stay the same means more current/power will flow through the motor resulting in more speed. However, more power also means more heat build-up and that the motor will try to apply more torque if the load increases, potentially more than it was designed for.
As noted on the motor’s product page, a general recommendation for brushed DC motor operation is to limit the load applied to your motor so that its continuous current draw is 25% or less of the extrapolated stall current. Stalling the motor anywhere near its rated voltage can result in rapid thermal (potentially on the order of seconds) thermal damage, and for motors with high gear ratios, like your 150:1 37D gearmotor, the high instantaneous torque could immediately damage the gears. So, if your application is causing your motors to stall, then the load from it is probably higher than what the motors were designed to handle.
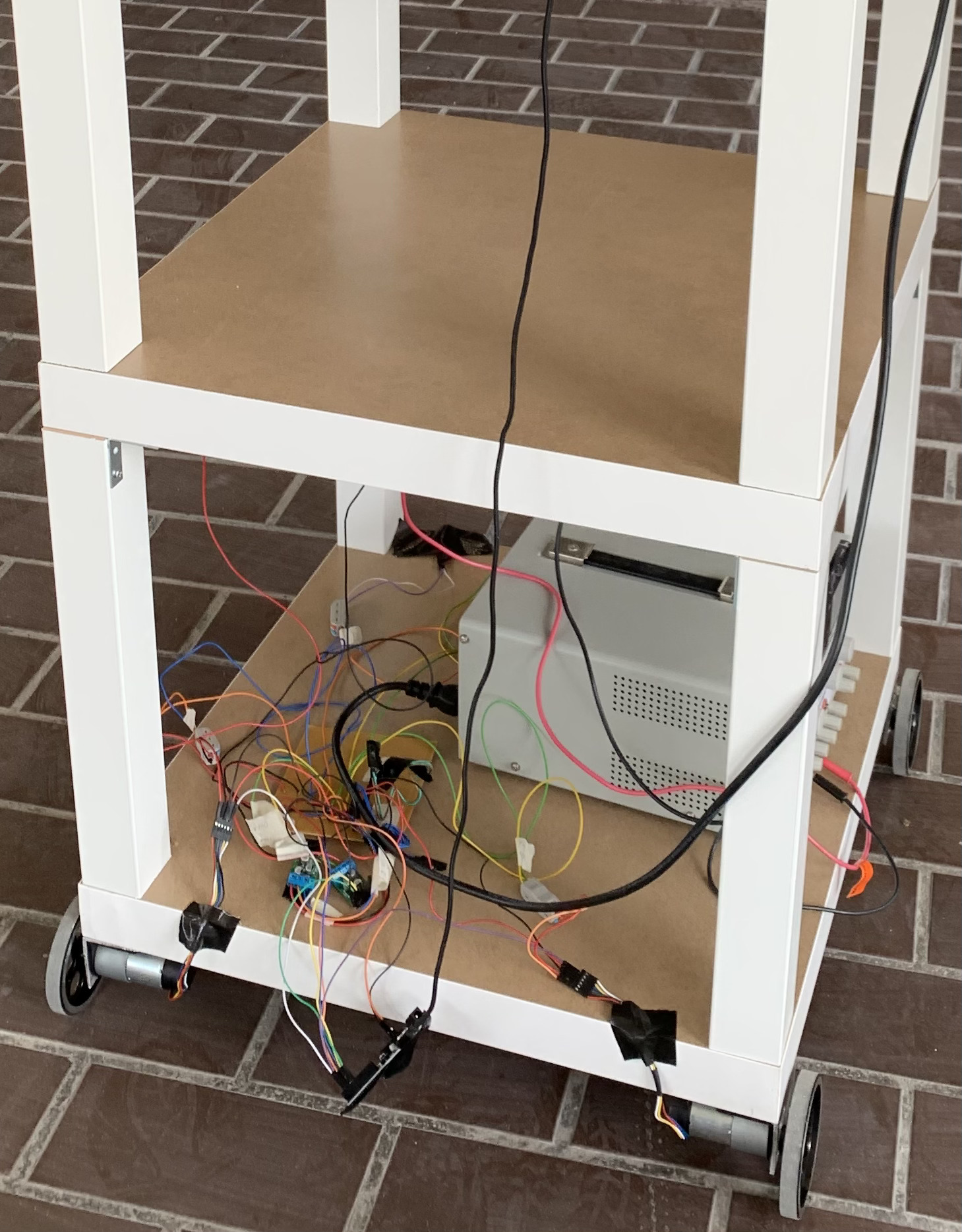
By the way, it sounds like you might be using one of our single motor drivers to power two motors that are connected to the same load; is that correct? That could also impact the longevity of your motors. Could you post some pictures that show how the motors are wired to the driver and how they are connected to your load?
Hi Patrick, thank you for the reply. You mentioned that the motor driver outputs a voltage that matches the applied operating voltage and duty-cycle. So, if I were to for e.g. apply a constant 12V to the motor driver, then the motor driver will output a constant 12V as well, is that correct?
My motors are connected to wheels which I’m using to move a wooden frame. The wooden frame will have a 90lb load placed upon it.
Yes, the driver outputs a voltage equal to VIN across its outputs at a duty cycle equal to the duty cycle applied to the PWM pin (which should be controlled with your logic voltage). That means if VIN is a constant 12V, and you want a constant 12V at the output, then you should apply a constant (100% duty cycle) logic high to PWM from your microcontroller.
Our 37D gearmotors are definitely not appropriate for your application. Aside from the torque requirements to move a frame with that much inertia, it looks like you are directly connecting the motors to your wheels which means the weight of your frame is being supported by the motor’s 6mm output shafts. We do not have the radial load limits for our gearmotors well characterized, but the practical limit would probably be something like 1 - 1.5 kgf (around 2 or 3 pounds) per 37D motor.
For something that heavy, you should probably be considering an altogether larger and more powerful class of motor, and even then you might need to look into ways of decoupling the weight of your motor from the motor shaft like using external gears, belts and pulleys, or chains and sprockets to transfer the motor power to another, heavier duty axle, that carries the weight. AndyMark and VEXpro might be good places to look for motors and hardware like that.