Also, just to confirm, it sounds like your stepper motor and driver work fine if you connect those by themselves and you only start having problems when you add the brushed DC motor driver to your setup. Is that correct?
Yes, that is correct.
Here are my GPIO/Rasp connections from my using the 8825 driver on the stepper. 13,19, and 26 were changed from a stepper to reg 12dc motor a while back but I’ve decided to try to work the stepper motor back in on my tilt.
The feed and rotation motors are
- Bringsmart 12rpm no load 12v 8mm shaft, has a full load rating of
70kg/cm rating at 9rmp.
- Bringsmart 40 rpm 12v has a 40kg/cm rating
Also on machine there are two high speed larger motors, but have no markings. I can just enable one Bringsmart motor and the stepper starts jumping at idle.
The tilt motor is an adjustment that doesn’t change much so just get locked into place while the other 3 or 4 motors run.
For the DC 12v motors I’ve tried both a Drok L298 controller (but have grounding issue with them so I’m now using a generic L298 motor driver.
I have taken off the jumper on the L298 and supply a 5v to the 5v pin from the pi. (3v burned up a pi). I have tried both a ground wire from the pi to the main ground (with the 12v power ground), tried no 5v ground, just the 12v ground, and also a 5v ground directly from the 5v power source.
I have a 18v battery going to a 10a 12.2v…reducer. From there it goes to off/on switch which then goes to a 5.4v buck converter for the pi and another switch that powers the L298’s for the dc motors as well as the stepper 12v supply. In my testing, I’ve tried many ac to 12v dc power supplies from 5a to 10a with same results. The 5v buck converters goes to 5v pos and neg pin on the pin 4 and 6. I’ve also taken a usb cable out of the buck converter and gone to the usb port on the pi for power. No change. Not 100% sure, but I think I also tried powering the pi from a different power supply.
On my desk testing, I’m using 120ac to 12v power supplies that I know to be good. Same results with the jitter whether going from my 18v battery through 12v conversion or just using 12v power from the ac sockets.
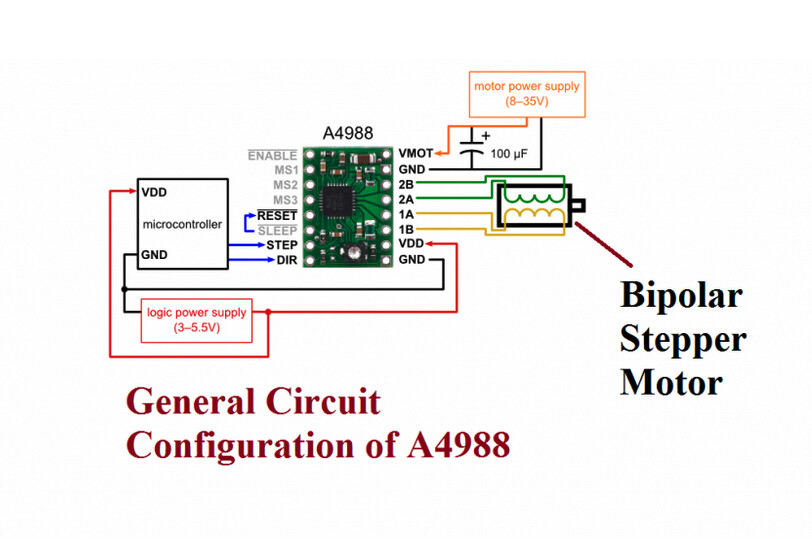
I get the same jitter at idle on both 8825 and a4988 (I’ve tried a generic a4988 and the Pololu a4988)
With testing with just 3 motors (1 stepper and 12v motors), I’m tried gpio 2 and 3 for the dir and step pins as well as some other free gpio pins, all with the same result.
Sorry I don’t have a better diagram, but everything is torn apart at this point always getting the same results with the stepper.
Thanks for looking into this.
Jim