I am currently using two tb6612 to control 2 micromotors with 1,6A stall, but I am trying to upgrade my project and now it would be a good idea to use four tb6612 to control four motors, two in each side of the robot. My question is, can I solder a tb6612 on another tb6612 making me able to control one 3,2A stall motor (the sum stall current of two motors)?
It might be possible to stack those motor drivers and run them in parallel, but at the point you are trying to do that you should probably be looking at a more powerful motor driver. You might consider the Dual MC33926 Motor Driver Carrier.
Thank you, Grant, for replying.
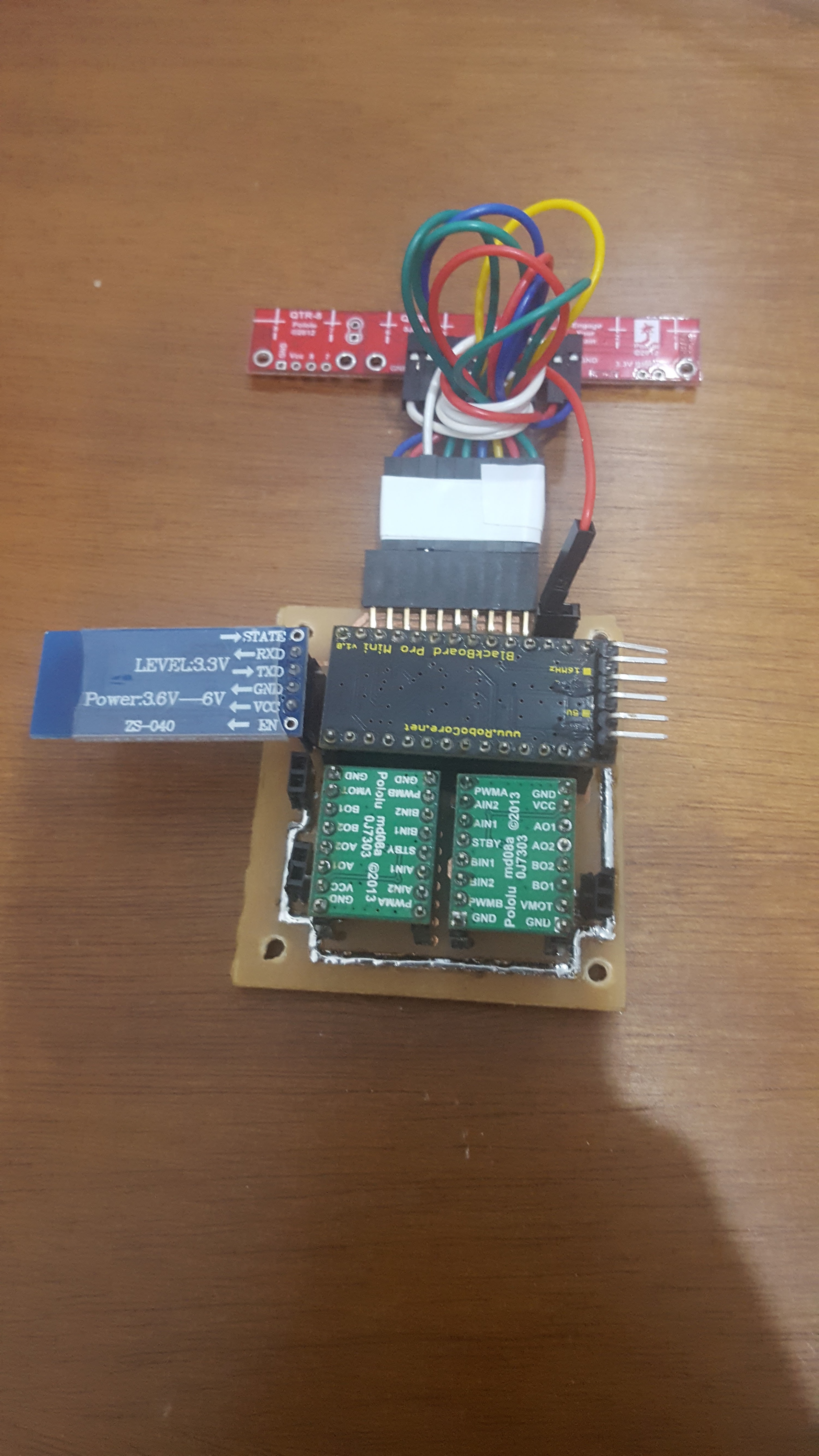
I didn´t know that Pololu had many different motor controllers, here in Brazil I can only find the tb6612 and the super motor Driver. As you can see in the picture the PCI is already done, and after changing a little bit the project to use more motors, the solution of simply stacking the tb´s seems the best. In the following weeks I will test it and show the result here. There is a video of the robot (previous to the modification) following a line using the QTR - 8A and 30:1 HP micromotors from pololu.
hello, i would like to see the pcb layout for the line follower on that pic, would you mind sharing it? im quite curious with how you routed the drivers in such small space
Hi, i am a college student and just packed stuff for summer… i will only get that robot back by the end of august. If you are still interested on that could you reply to this topic by then? I made it quite a long time ago, so i dont have the eagle files anymore…