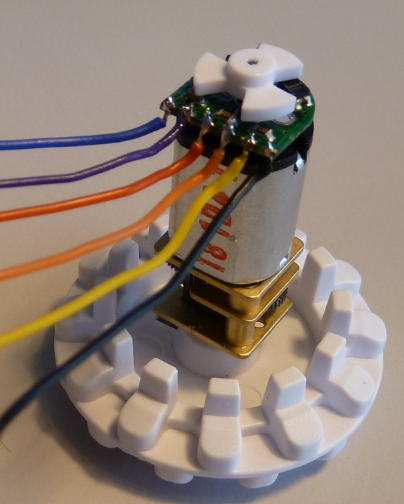
I managed to get the shaft mounted optical quadrature wheel encoder https://www.pololu.com/product/2591 to work inside the Zumo chassis.
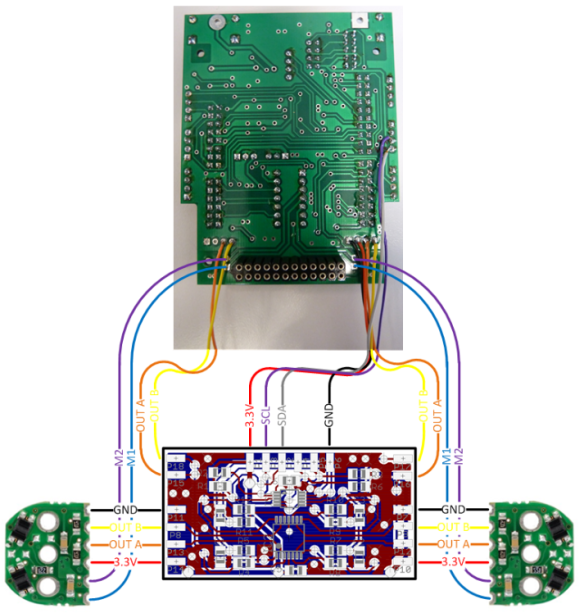
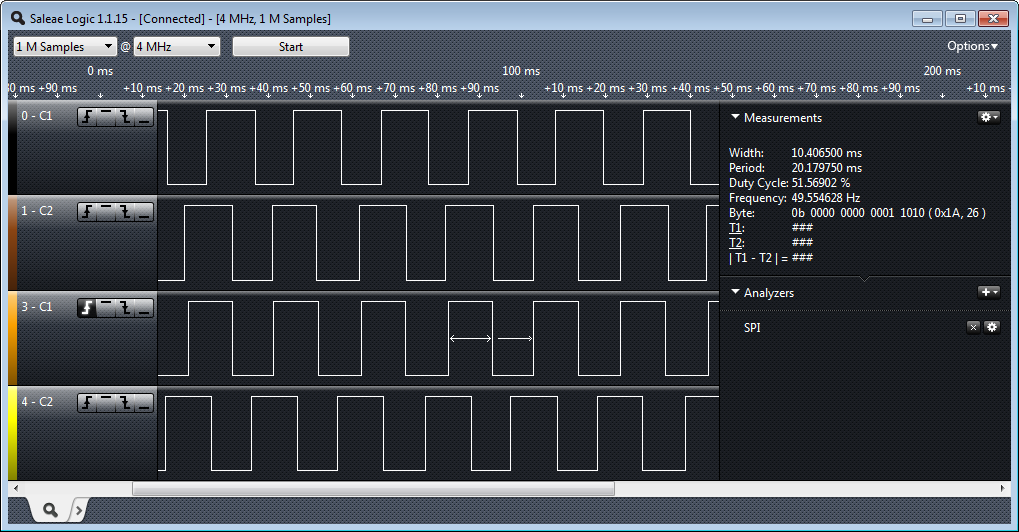
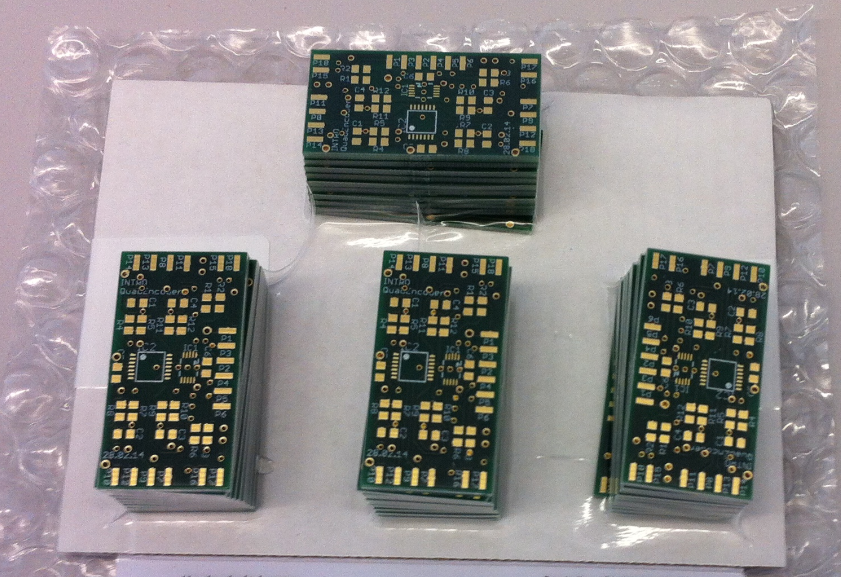
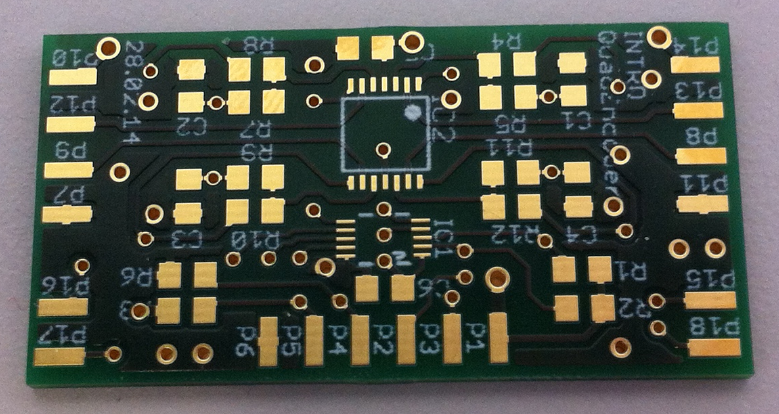
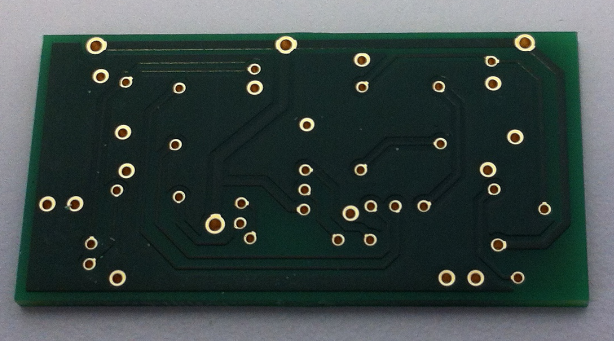
As the encoder produces an analog signal, and we have seen that it can be heavily impacted by light and other factors, we decided to create a processing PCB which transfors the analog signal into a clean and calibrated digital quadrature signal. With this, we are able to accurately process the signal of the 1:75 Micro Metal Gear Motor at full speed with the 3-tooth encoder. Best of all: the Zumo Bot can perform per software an auto-calibration
I’m also using the Micro Metal Gearmotors, with the newer Pololu optical shaft encoders, for some of my robots. I am interested in building some of your encoder boards for myself, possibly using 0.1" spaced headers instead of soldering wires directly to the board. However, I could not find any Eagle or other CAD files for your encoder board. Do these files exist in your GitHub repo somewhere?