Hello everyone, I am Angel, from Spain, at first sorry for my english (if I make any mistake),
I have one problem with my driver jrkv12, the problem is that when i connect my driver to the source and i try to control this by my code (by visua studio), at first i have to move
my actuator with the software of pololu(Jkr configuration unitility) and later i
already can move my actuator with the visual studio(It´s like if i
should open some kind of port or something like that), can anyone help me
with that?, do you know what i should do for controling since the benining with my code, I mean without i have to move at first with Jkr configuration unitility.
Thanks in advance.
Angel.
Hello, Angel.
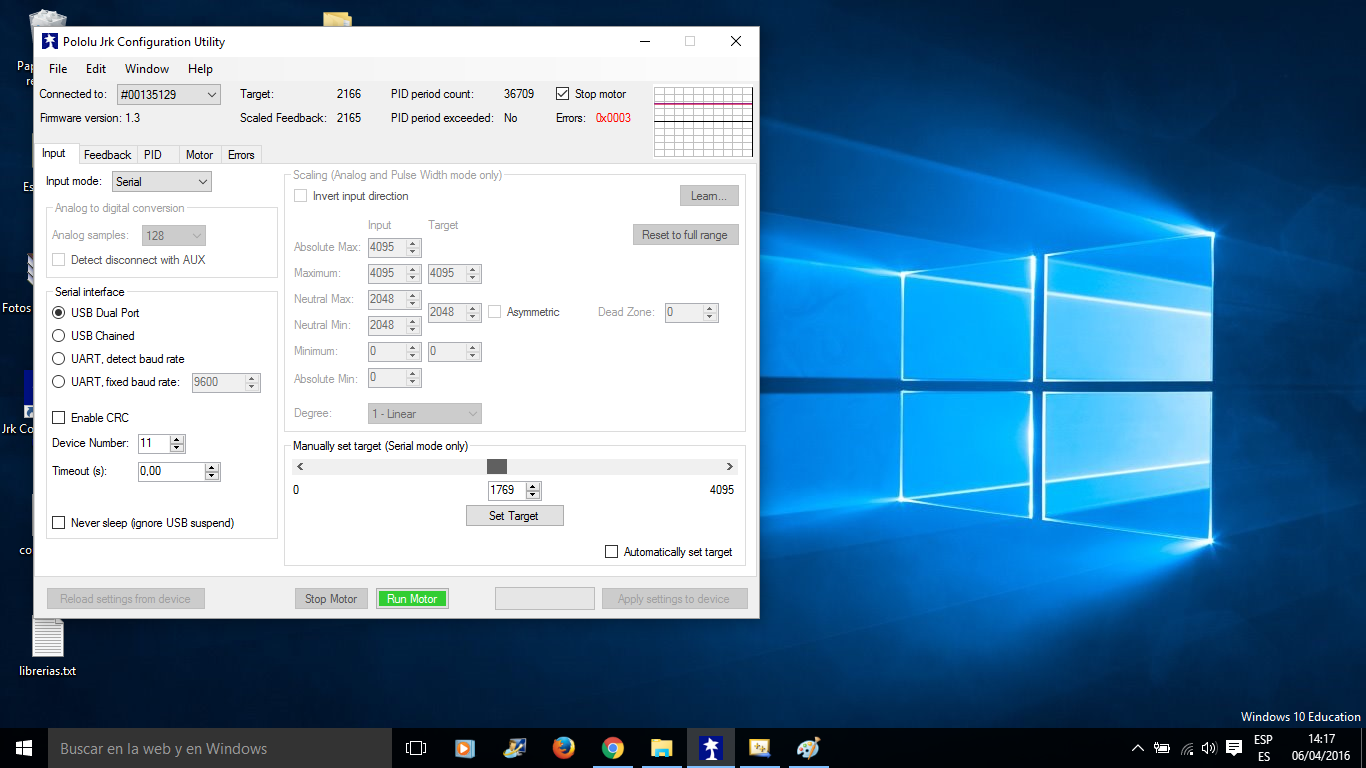
Can you post your entire code here? (It is difficult to help you troubleshoot your code without seeing it.) How are you running your program and what inputs are you giving to it? Can you post screenshots of the “Status” tab in the Jrk Configuration Utility after a failed attempt to move the actuator using your program?
- Amanda
Hello, Amanda.
Yes of course i can explain better.
What I mean is that when i run my code, everything works properly, but i need to move my actuator by my driver(jrkv12) but this don´t move until It is moved at first by Pololu jrk Configuration Utility.
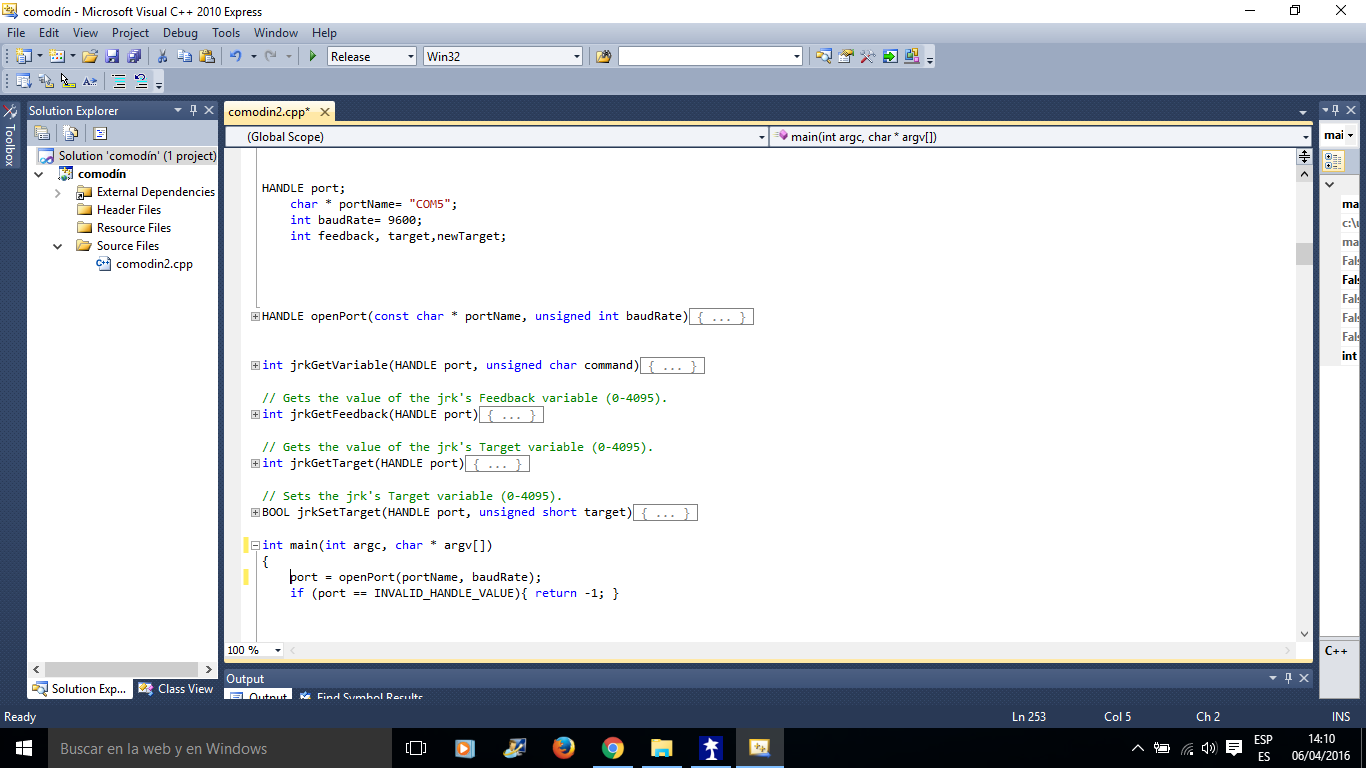
My code i this, wich i downloaded from your website.
And when I try to run my actuator don´t move if i don’t move with your software at first as manually
Thanks in advance.
Angel
Can you copy and paste your entire code here so I can see exactly what it does?
From the screenshot of your Jrk Configuration Utility, it looks like the jrk is reporting that it is not being powered (see the “Error Reporting Commands” section of the Jrk USB Motor Controller User’s Guide). Can you make sure that your jrk motor controller is properly powered before trying to move your actuator with the jrk from your program? If you are still unable to move your actuator from your program, can you open the Jrk Configuration Utility and post a screenshot of it here?
- Amanda