
Problem Statement:
I am currently using a Pololu 75:1 gearmotor (product # 4866 [product link below]). With nothing attached to the shaft of the motor, the motor performs fine, drawing approximately 0.2 A (minimum free run current). However, as soon as I apply any load (even using my fingertips to hold down the d shaft), the motor seizes up, and doesn’t even attempt to pull current beyond its 0.2 A free running current.
The stalling current on these motors is 2.1 A, but the fact I can’t get the motor to even pull a little more current beyond free run makes any mechanical actuation impossible.
Setup:
My project is to build a functional R2D2 that is 3D printed. For this specific motor, it is a direct drive at the center of rotation of R2’s dome head.
I estimated that the head’s weight is approximately 10-15 lbs with a 45 deg/s max rotational speed. I’m pretty confident that my math justifies this motor can handle that torque load.


Now for the circuit, for starters, I am using a breadboard for all of my connections so far, I know that is not wise for driving motors, but for now all I am trying to do is verify mechanical and electrical comms motor by motor, then get the final PCB and solders installed.
The motor is controlled by a SparkFun TB6612FNG motor controller (link below) that receives commands from an Arduino Pro Mini (5V logic).
A Raspberry Pi 3 B receives inputs from an Xbox Controller, which then relays those signals via I2C into the Arduino, then the Arduino commands the motor controller. (The LEDs in the diagram are the A,B,X,Y controller digital response feedback and have nothing to do with the motor control). For now, I am simply using the following command in the Arduino IDE for the motor:
motor1.drive(100,1000); //This is a command from the SparkFun motor controller library.
The power source is a standard DC power supply from Amazon (link below) which has a max current output of 5 A. I’ve cranked the current limiter all the way up and had no effect.
When motor is running, output current is about 0.5 A, when motor is not running, output current is about 0.25 - 0.3 A.
The power source delivers 12 V directly into the VM pin on the motor controller (I validated that 12V is indeed going into this pin), while a voltage regulator is connected in parallel to step down the voltage to 5V to drive the raspberry pi and arduino. [I have tried separating the power from these sources and did not resolve this issue]
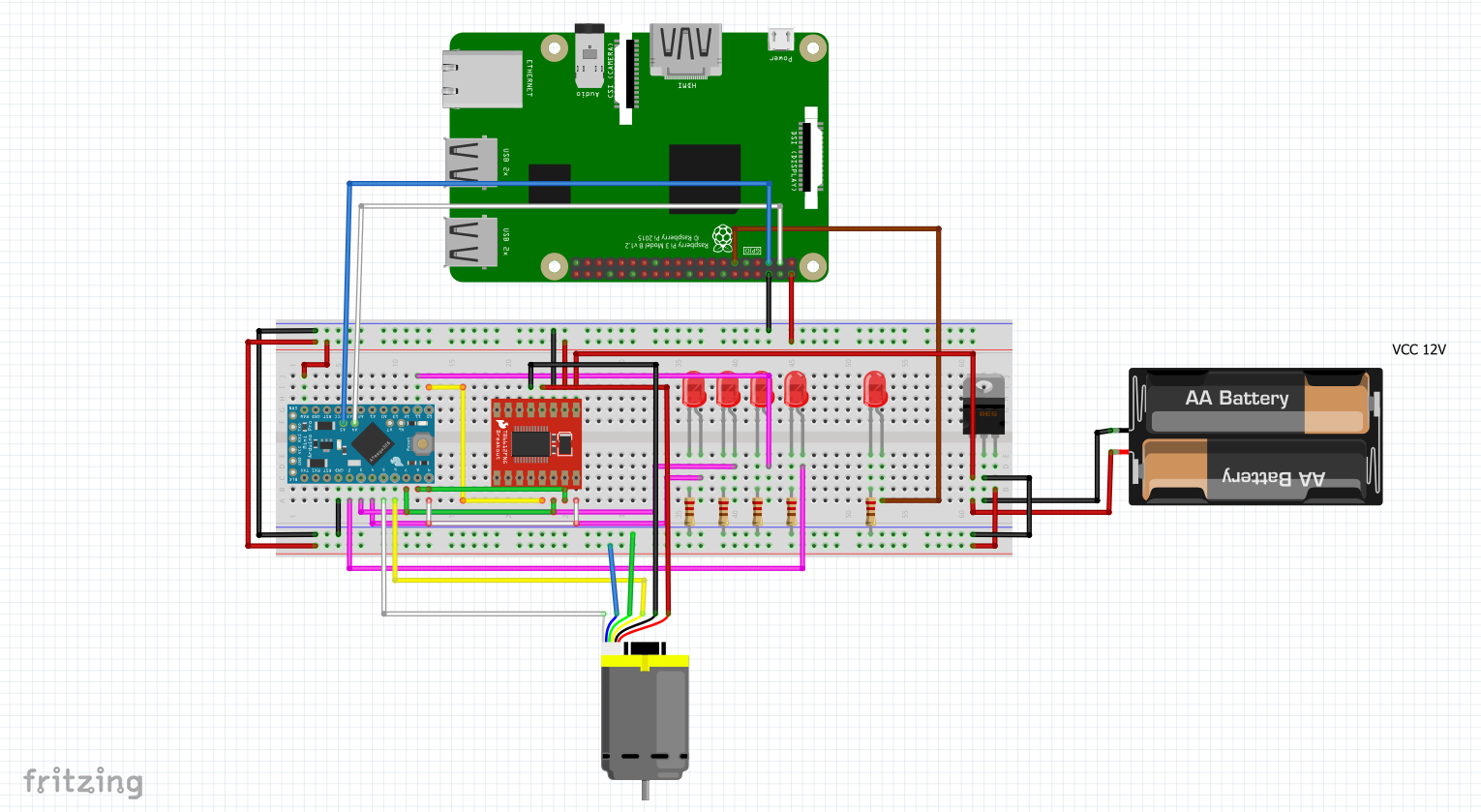
And to show the physical setup, here it is (please use the diagram to reference the connections).
I hope this is enough information. Please let me know if there is any more clarification needed.