
I’m developing a project in college with a linear actuator LACT12P-12V with feedback, using a motor controller that was recommended, jrk 21v3, and a doubt came up. Apparently, everything is working fine, but my question is about position of the actuator, for example, I’ve read all the manual and I know that 5V (4095 on the slider in configuration utility) represents maximum position and 0V minimum position (0 on the slider in configuration utility). So far it’s OK, now, how about 2048? Should that represent half position? I’ve set up everything according to the jrk 21v3 manual and the actuator doesn’t stop at the half position with the value of 2048. First, I thought that the parameters of PID were not right, then I downloaded a .txt file (pololu.com/product/1394/resources) that contains all the settings just to make a test and the result was the same. How can I solve this?
Hello.
I am sorry you are not getting the behavior you expect. Can you tell me more about your setup? What is the length of the actuator stroke when the jrk’s target is 2048? How are you supplying power to the actuator’s potentiometer? Also, we have two LACT12P-12V actuators with feedback; which gear ratio do you have (20:1 or 5:1)?
-Jon
Setup: That txt file I mentioned I just downloaded and upload it on jrk 21v3. As described on the website, we don’t need to make any changes.
Length: It’s approximately 3.4cm when jrk’s target is 2048. That’s the problem. It’s not half position.
Gear ratio: 5:1.
How are you supplying power to the actuator’s potentiometer? What is the voltage on the FB pin when the target is set to 2048? Can you also post pictures that clearly show the connections on your jrk?
-Jon
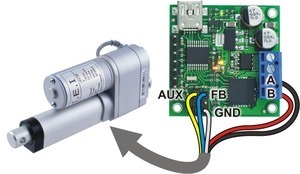
I’m supplying power to the actuator’s potentiometer according to Figure 1.
The voltage on the FB pin is 3.64V when the target is set to 2048, and when the target is set to 0 the voltage is 2,6V.
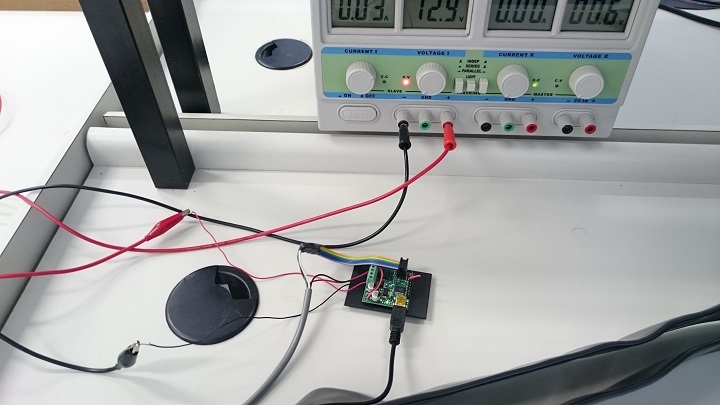
I measured the potentiometer wiper output voltages of a Concentric linear actuator in my office when supplied power from the jrk’s AUX pin, and found values of about 0.2V and 4.3V for the extremities (i.e. fully-retracted or fully-extended), and about 2.2V for a Target position of 2048.
Can you remove the jrk motor controller from your setup, supply 5V across the potentiometer, and measure the wiper (blue wire) voltage when your actuator is at its fully-retracted, half-way, and fully-extended positions? With your benchtop power supply, you can supply power directly to the motor leads to move it to the fully-retracted and fully-extended positions (at each end the actuator’s internal limit switches should stop it).
-Jon
Hi,
I found out what was happening. I was using a conector with short circuit between AUX and FB pin.
After solving, it worked perfectly.
Thanks and sorry for bothering you.
I am glad you were able to get it working; thanks for letting us know what the issue was!
-Jon