At long last, the perfect platform for tabletop autonomous robots!
A small, inexpensive but high-precision Faulhaber gearmotor/encoder combination is available surplus for about $12.00 each. It seems to be ideal for a line maze solver, micromouse, etc. It has an optional right-angle ball bearing drive shaft (3 mm diameter by 7 mm long) which is extremely convenient as it fits the Solarbotics wheels perfectly.
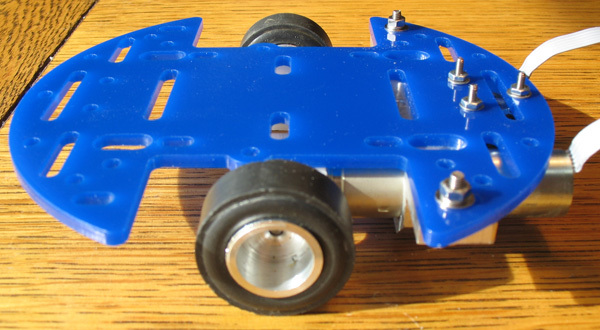
I’ve built a small platform using the circular base and ball caster from Pololu. Gearmotor encoder specs are 5 volts, AB quadrature, 141:1 reduction for wheel motion of 70 rpm, 564 counts/wheel revolution. The motor draws about 30 mA @ 5V no load and seems to have plenty of torque. The encoder output is triggered by an internal magnetic disk with one sector per motor revolution, which even at 10,000 rpm is a light interrupt load (about 6 milliseconds per revolution, 1.5 ms/channel).
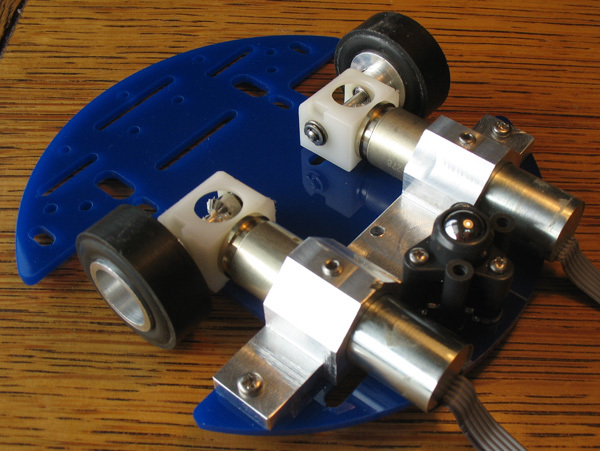
To mount a side-by-side pair of motors, I machined a simple bracket out of 3/4 inch aluminum. A 41/64 drill is a very close fit for the motor body and the result can be snugged up with an 8-32 setscrew. See below for photos. At the moment, I have the ball caster at the back due to the uneven weight distribution. The platform moves 22 feet/minute at full speed!
The controller will be the Orangutan, and I’ll post details later. Some time ago, I posted software for the Orangutan that uses pin change interrupts to decode quadrature encoders, see Quadrature encoder for the O. I used this without modification to track the wheel position and am currently working on PID speed control.
You are right about the speed, but it is OK for experimentation with table top/line maze robots. I’m more interested in positional accuracy at the moment.
I’m looking for larger wheels to speed it up–any suggestions? A larger hub with grooves for O-rings will be next, but commercial wheels with wide tires similar to the ones from Solarbotics would be great. The motors should tolerate higher voltages, so 1 foot/second might be readily obtainable.
To make that particular bracket I used a Bridgeport mill at the school shop, but the small Sherline mill is fine for work like this.
This is a very appropriate platform for the development of line maze sensors, code and overall skills.
It may not win a serious line maze race but it definitely gives a novice/intermediate competitor the best chance of not coming in last or failing to finish.
Most line maze robots fail to finish. Heck, most line maze robots fail to ever compete at all! One reason for this situation is people underestimate or fail to plan for the difficulty of the basic problem(s), which are formidable even at a snail’s pace. A critical requirement for line following and line maze is precision of movement and odometry. Another is robust reliability. This platform provides that at a low cost. Awesome!
The only issue preventing it from being ideal for general use by more people is that fancy mounting bracket, which most people would probably build with less precision due to their limitations of equipment. But you could easily design a suitable bracket from sheet plastic and have Pololu cut it from Acrylic with their laser service.
I wouldn’t bother changing to larger diameter wheels to increase the speed. It will never be fast enough to race against a robot designed like a competition micromouse for instance. Also you have so much gearing up already that gearing back down with larger diameter wheels will only degrade precision of movement. Once you reach the point where the robot actually executes line mazes perfectly, then you might want to design a more competition style platform, perhaps like this:
If I could afford one, wouldn’t the Ferrari be a valid first car? Wouldn’t it be a better starting platform than a riding lawn mower (not one of those souped-up ones), in which I could never go faster than 10 miles an hour? To me, Ferrari means some kind of sports car, which seems like a reasonable first step toward race car, and some kind of quality and luxury, which is not really relevant to the discussion of appropriateness for learning. By the way, these motors Jim found are probably the Ferrari for line maze robots since they would cost $150 new.
Given that cost is a big consideration for most of us, I would like a platform to give me room for growth. I might initially try things at 4 in/s or even less, but I’d like to have the option of going faster without having to rebuild a new platform. I think that a foot per second is still not at all too fast, and making the platform capable of it would help keep it interesting much longer.
I hope I’m not sounding too negative here; I was really excited by Jim’s post, and I ordered some of the motors as soon as I saw his post. I just wish they had a three or four times lower gear ratio. I’ll post any ideas I come up with for bigger wheels.
The analogy with the Ferrari is if you start with a beast with more acceleration than you can effectively control, you will waste time and expensive Ferrari’s just learning to avoid spinning the tires and skidding out of control.
True, if you back off and operate very conservatively, you can have the best of both worlds.
When someone locates $12 motors that have built-in precision encoders, Swiss quality and maybe 40:1 reduction, then it would be “better” to start with those.
Starting with poorer quality and especially without precise odometry to obtain economy though is a bad choice.
Just glanced at my website analytics and saw that some people are still reading this post!
The URL has changed a bit for the information I gathered on these motors.