I am using a Jrk21v3 motor controller to power and control a 12v wiper motor. This motor is used to rotate 2 trim wheels connected to one driveshaft.
The maximum current drawn when the motor is under load and rotating at its fastest is 1.82A, this is measured using a multimeter with a direct 12v 10A power supply connected directly to the motor.
All I want the motor to do is rotate at its fastest speed in both directions interfaced through the Jrk21v3 usb direct connection.
I have set up the Pololu software where the motor is running to my satisfaction and saved the configuration. I then select disconnect in the Pololu software and close the programme.
I then run my flightsim programme (ProSim) and have configured the switch to operate the wiper motor, this it does and the motor spins in both directions dependent upon the switch up or down position. The problem I have is that the motor spins at a much slower speed than I have set it up to run in the Pololu software.
Not sure what the problem is, all help appreciated.
The power supply to the Pololu card is 300mm long and the lead to the motor is 210mm long. I am not using any feedback for the motor, only the usb connector, power and motor terminals are used.
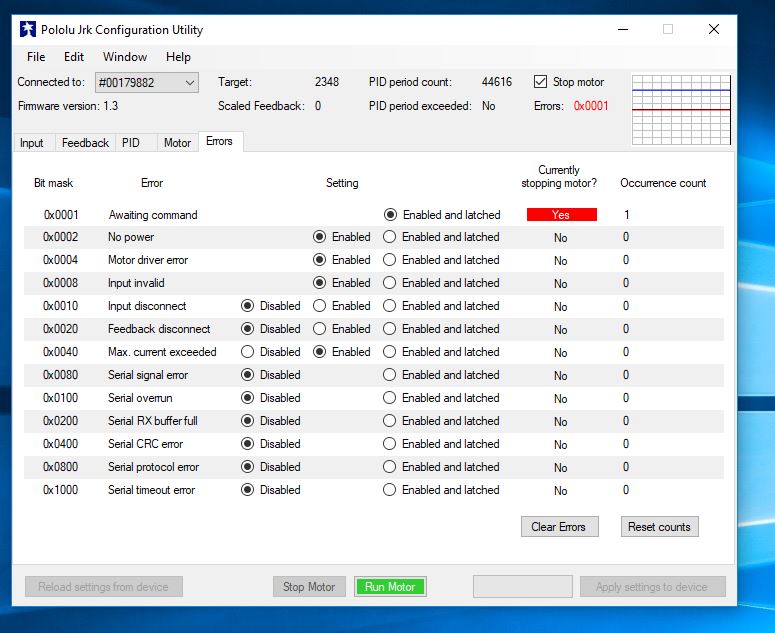
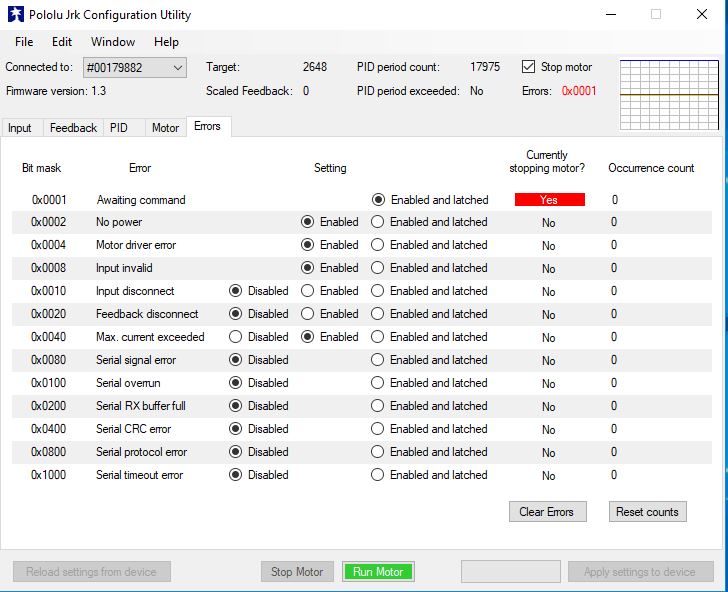
There could be multiple things that would cause that kind of behavior. To start, it is worth noting that based on the test you mentioned your motor could draw much larger bursts of current than the jrk 21v3 carrier’s 5A peak rating, especially when switching directions or starting from rest. Is your jrk triggering an error when you try to run your system (indicated by the red LED on the board)? If so, can you connect to the Jrk Configuration Utility and see which error is being triggered in the “Errors” tab? Also, can you post your jrk settings file? You can save your settings file by selecting the “Save settings file…” option within the “File” drop-down menu in the Jrk Configuration Utility.
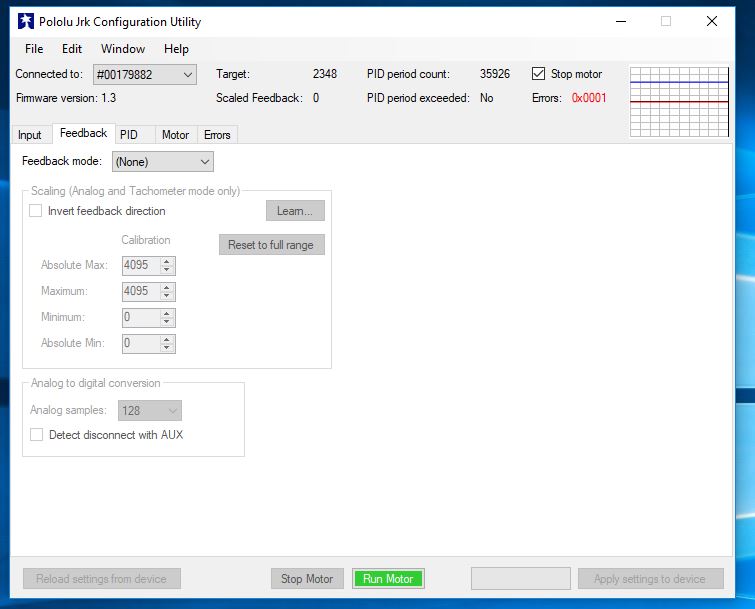
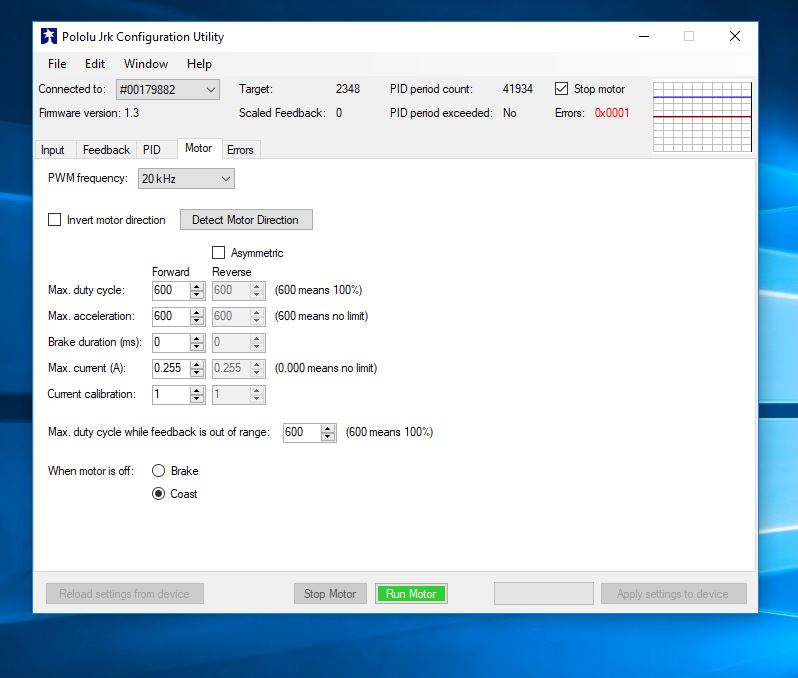
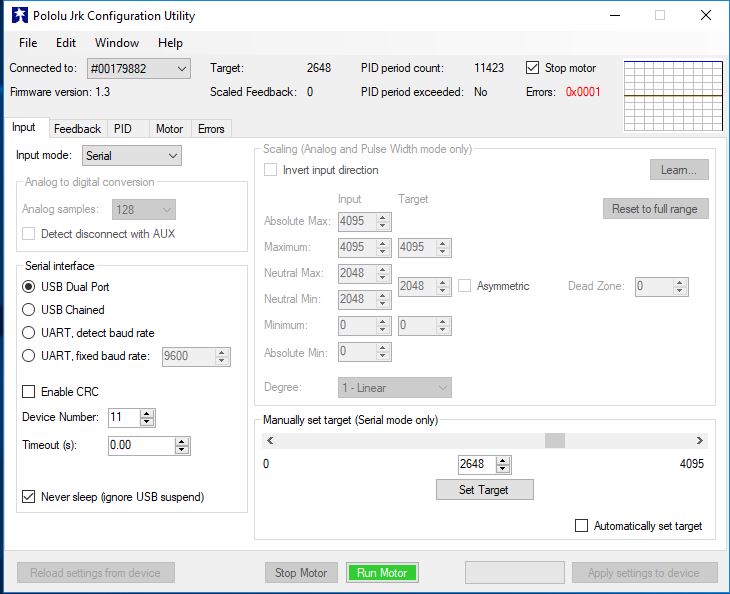
If you are not getting any errors, the next thing to check is what the ProSim software is sending to the jrk. You might try connecting to the Jrk Configuration Utility and seeing what value the “Target” is displaying (just to the right of the “Connected to” drop-down menu) after the ProSim software has commanded the motor to move. With the feedback set to “None”, the target value for full-speed forward is 2648 and full-speed in reverse is 1448. However, as I mentioned earlier, it sounds like your motor might be able to draw large bursts of current when starting up or switching directions, so it might be a good idea to use set some acceleration limit (or possibly limit the max duty cycle) in the “Motor” tab to try to reduce the possibility of a damaging spike.
Additionally, if you do not have the “Max. current exceeded” error enabled, I would recommend doing so and setting an appropriate current limit in the “Motor” tab of the Jrk Configuration Utility. This should not be relied on for preventing damage, as spikes can happen too quickly for the controller to respond, but it could still help in some cases.
I noticed you changed the current calibration setting, which is almost certainly causing the current reading to be interpreted incorrectly by the jrk. The default current calibration value (37 for the jrk 21v3) should generally not need to be changed unless you measure the current and determine that the jrk’s numbers are inaccurate. More information about the current calibration value can be found in the “Motor Options” section of the jrk controller’s user’s guide, under the “Limits” heading. Also, 0.255A is a pretty low current limit if you expect your motor to draw 1.8A when your application is running. You should probably set it to something a little higher than this (e.g. 2A).
Can you try changing the current calibration setting back to the default value and raising the current limit?
Hi Brandon
I have set the current calibration to 37 and the current limit to 2.072, I also set the target to 2648.
I then ran Prosim and the motor is still running slower than I expected.
I then went back into the configuration utility where the target was at 1748, is this decided by the software to keep the current limit to 2.072?
Best regards
George
Hi Brandon
Thank you for taking the time to look at this.
I’ll certainly do as you suggest and feedback my results.
Best regards
George
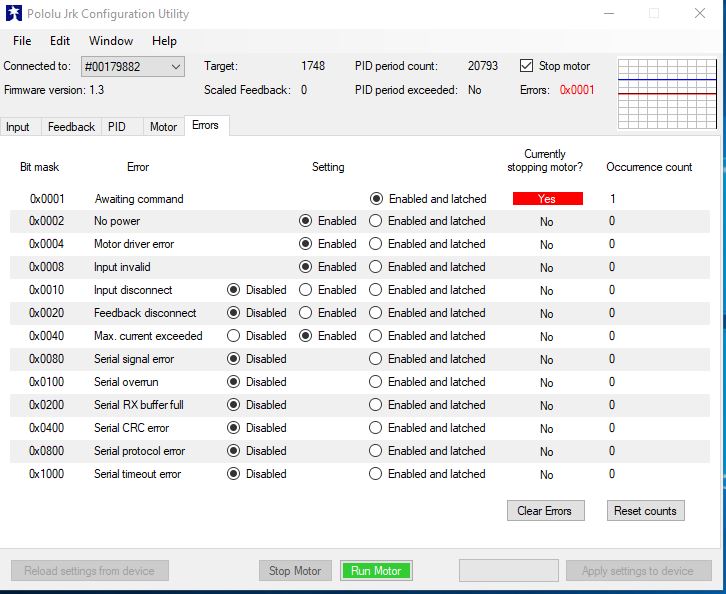
When the “Max current exceeded” error is set to “Enabled”, it will disable the output of the driver until the current measured is below the configured threshold. It should not change the target value if it gets triggered, and from your pictures it looks like the occurrence count for that error looks like it is still 0, so it has not been triggered.
If the target changed to 1748 and you expected it to be at full speed, it sounds like the ProSim software is not sending the correct target values. As I mentioned before, I am not very familiar with that software, but I do not see any problems with your current jrk settings. You might try contacting the creators or posting on their forum to see if they have any suggestions.