
Hi
I am new to electronics. I am using a Jrk to control throttle levers in an aircraft simulator.
I have the card connected to a 12V dc motor and potentiometer as per your diagrams.
In the software, I selected analog input and when I move the levers connected to the pot, I can see the imput value change from 0 to 4080. All good.
I then use the “learn” function to set the limits. Now here it sets the maximum at 4080, but the minimums are set at 2040 and not 0.
Then the target value (blue line on graph) keeps fluctuating from 0 to 4000 several times per second, which makes the motors jitter and not functioning properly.
What am I doing wrong?
How is the “target” value calculated or set?
When I manually enter 4080 as max and 0 as minimum input values, the target value is stable at 0 and the levers move to the 0 position and stay there, no matter what. Even in the simulation software (prosim), the levers remain at that target value.
Any help is appreciated.
Thanks
Ethan
Hello, Ethan.
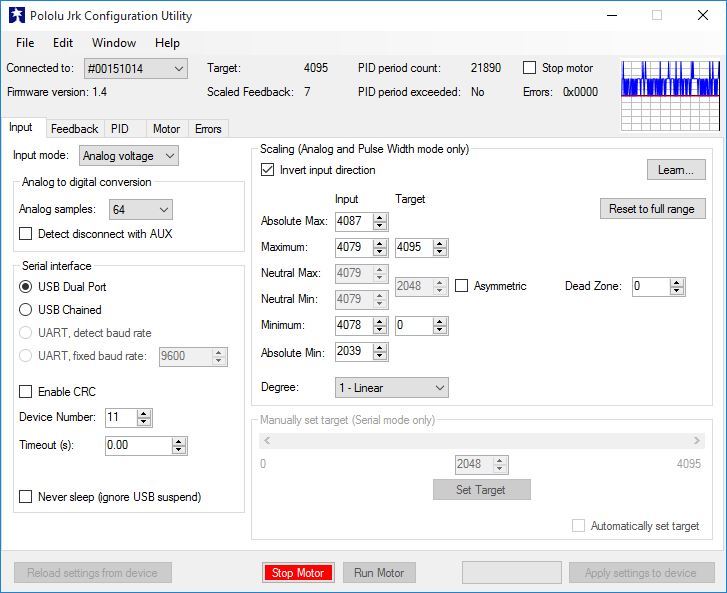
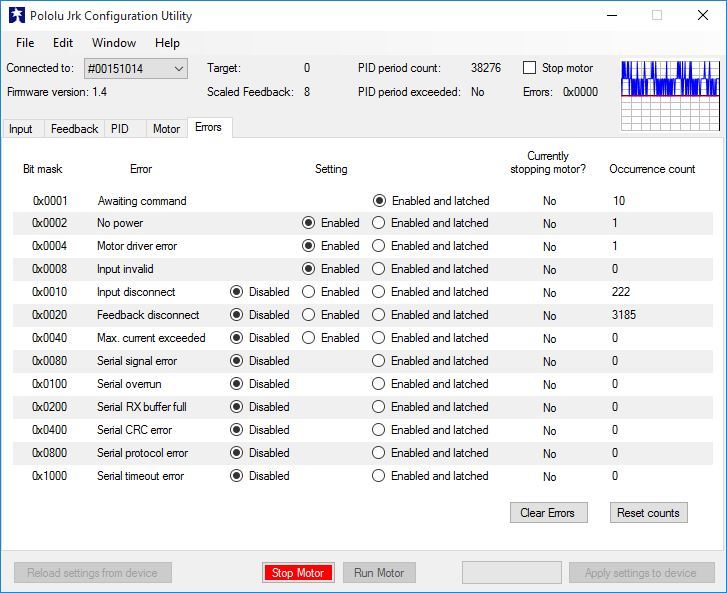
When using an analog input, the target is calculated using the values in the “Scaling” box of the "Input tab in the Jrk Configuration Utility. By default, the Input values will map linearly to the Target values. Is the red LED lighting up at all? Could you check the “Errors” tab to see if any errors are occurring?
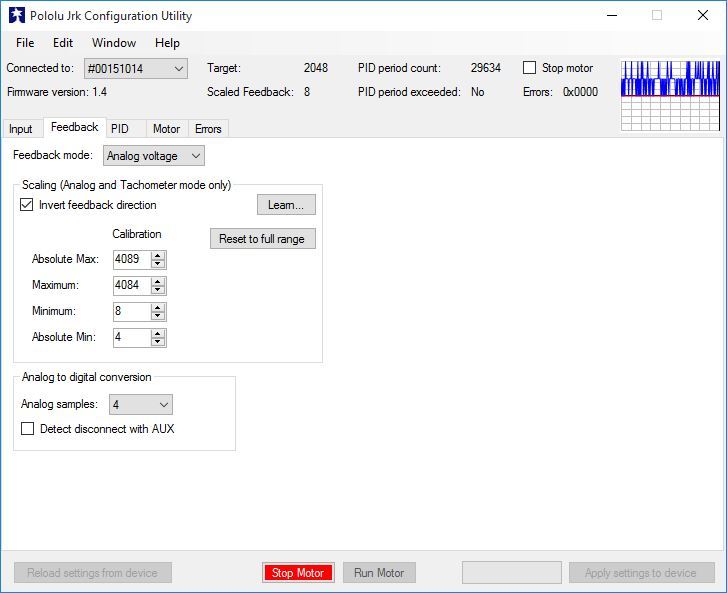
Could you try measuring the signal from your potentiometer directly using a multimeter? Also, what feedback mode are you in? Could you try using the “Learn…” function again and then saving your jrk settings file and posting it here? You can save your settings file by selecting the “Save settings file…” option within the “File” drop-down menu of the Jrk Configuration Utility.
Brandon
Hi Brandon
Thank you for your reply.
I have done what you suggested.
The red light on the card is not on and there are no errors.
I have checked the pot with a multimeter and it works well. The values range form 67 Ohm to 9 kOhm linearly without jitters. (I think the units are correct)
I include the settings below…
I started the utility program, clicked “learn” under the input tab and calibrated the inputs. I clicked save and run motor. The target value fluctuate between 0 and 2048 and sometime going to 4089. The motor jitters.
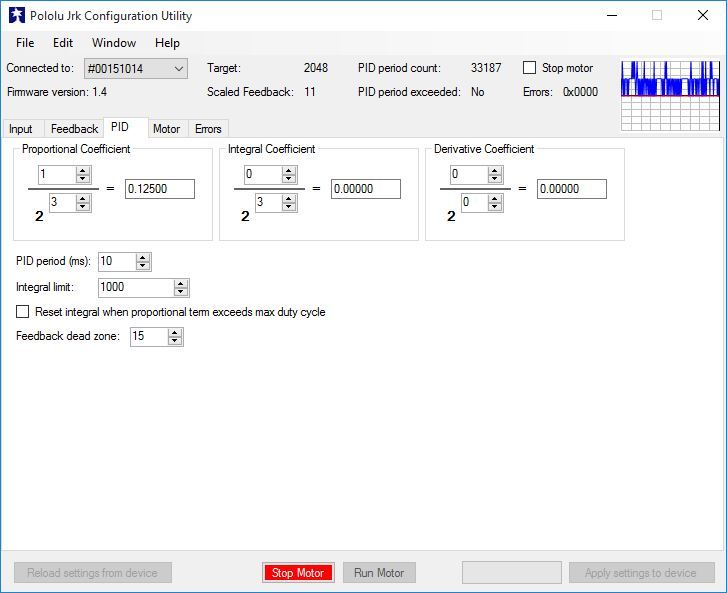
Here are screen shots of the program

Here is the setting file…
INITIALIZED 0
INPUT_MODE ANALOG
INPUT_MINIMUM 4078
INPUT_MAXIMUM 4079
OUTPUT_MINIMUM 0
OUTPUT_NEUTRAL 2048
OUTPUT_MAXIMUM 4095
INPUT_INVERT 1
INPUT_SCALING_DEGREE 0
INPUT_POWER_WITH_AUX 0
INPUT_ANALOG_SAMPLES_EXPONENT 4
INPUT_DISCONNECT_MINIMUM 2039
INPUT_DISCONNECT_MAXIMUM 4087
INPUT_NEUTRAL_MAXIMUM 4079
INPUT_NEUTRAL_MINIMUM 4079
SERIAL_MODE USB_DUAL_PORT
SERIAL_FIXED_BAUD_RATE 9600
SERIAL_TIMEOUT 0
SERIAL_ENABLE_CRC 0
SERIAL_NEVER_SUSPEND 0
SERIAL_DEVICE_NUMBER 11
FEEDBACK_MODE ANALOG
FEEDBACK_MINIMUM 18
FEEDBACK_MAXIMUM 4075
FEEDBACK_INVERT 1
FEEDBACK_POWER_WITH_AUX 0
FEEDBACK_DEAD_ZONE 15
FEEDBACK_ANALOG_SAMPLES_EXPONENT 0
FEEDBACK_DISCONNECT_MINIMUM 9
FEEDBACK_DISCONNECT_MAXIMUM 4085
PROPORTIONAL_MULTIPLIER 1
PROPORTIONAL_EXPONENT 3
INTEGRAL_MULTIPLIER 0
INTEGRAL_EXPONENT 0
DERIVATIVE_MULTIPLIER 0
DERIVATIVE_EXPONENT 0
PID_PERIOD 10
PID_INTEGRAL_LIMIT 1000
PID_RESET_INTEGRAL 0
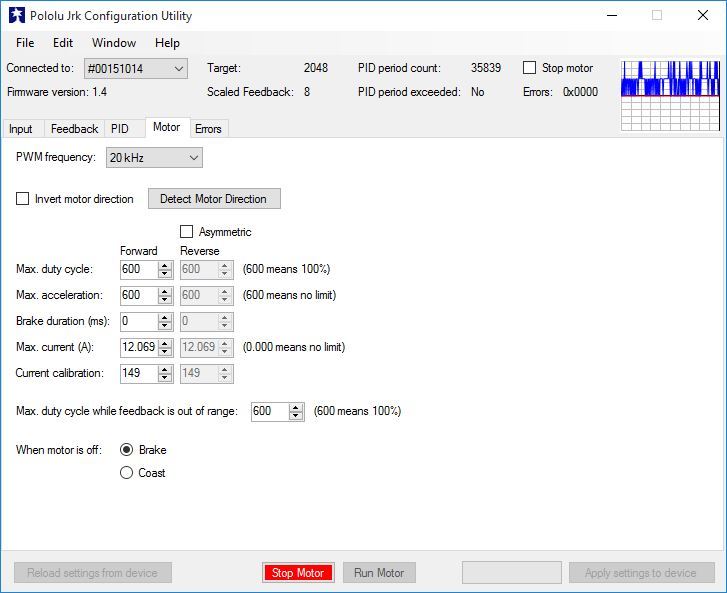
MOTOR_PWM_FREQUENCY 0
MOTOR_INVERT 0
MOTOR_MAX_DUTY_CYCLE_WHILE_FEEDBACK_OUT_OF_RANGE 600
MOTOR_MAX_ACCELERATION_FORWARD 600
MOTOR_MAX_ACCELERATION_REVERSE 600
MOTOR_MAX_DUTY_CYCLE_FORWARD 600
MOTOR_MAX_DUTY_CYCLE_REVERSE 600
MOTOR_MAX_CURRENT_FORWARD 81
MOTOR_MAX_CURRENT_REVERSE 81
MOTOR_CURRENT_CALIBRATION_FORWARD 149
MOTOR_CURRENT_CALIBRATION_REVERSE 149
MOTOR_BRAKE_DURATION_FORWARD 0
MOTOR_BRAKE_DURATION_REVERSE 0
MOTOR_COAST_WHEN_OFF 0
ERROR_ENABLE 2
ERROR_LATCH 0Thank you for your help
Ethan
Thank you for the additional information. It looks like your input scaling values are all around the 4080 mark, which seems really strange. Are you following the directions when going through the “Learn…” mode? You should be prompted to move the potentiometer from one extreme to the other, then back to the middle. I also noticed you have the feedback mode set to “Analog Voltage”; what are you using as feedback and how do you have it connected? Could you post some pictures of your physical setup that show all of your connections?
Brandon
Brandon
I have worked it out thanks to your email.
I switched to serial mode.
I only had 1 pot connected to FB input.
Now it works
Thank you
Ethan