
had my jrk working fine but messed around while programing it and crossed wires on or around the feedback pin and now my computer wont recognise my jrk. 12v12 with feedback .when plugged into usb cable green light will flash then yellow and red and its almost like yellow and red lights make the green light dimmer. also when not attached to usb cable but with 12volt battery and12volt wiper motor attached (NO SIGNALS AT ALL) it cycles the motor .1/4turn 1/4turn then2 full revolutions with the red and yellow lights still flashing once every 2 seconds. have seen yellow light come on by itself .have seen red by itself too…what is a hard reset? im new to this sure could use a buddy to help me!
Hello, barley12.
Please try disconnecting all the wires you have connected to the Jrk. Once everything is disconnected, try plugging it in to USB. Does it show up in your computer’s Device Manager? How do the LEDs behave when you plug it in? (I’m looking for a more detailed description of their behavior, such as “Green flashes briefly twice, then the red one is on solid while the yellow one blinks slowly indefinitely.”)
-David
P.S. I put your post in to its own topic because it sounds like a different problem then the other topic.
i still cant get my computer to recognise my jrk12v12 even after reseting and redownloading programs…
What do you mean by “reseting”? Did you try the advice in my first post? -David
reset my computer and redownloaded files. yes all wires to jrk are disconnected . still cant get my computer to recognise my jrk12v12 with feedback…note.my first post is edited with all the lights info. thanks david
This description still is not very clear to me. How many times did the green light flash? Did the yellow and red lights flash in unison? The patterns seen at startup might be different from the patterns seen after the device has been plugged in for a while. What is the sequence of flashes at startup? What is the sequence of flashes after the jrk has been plugged in for a while?
Maybe your USB cable went bad. Do you have another cable you could try?
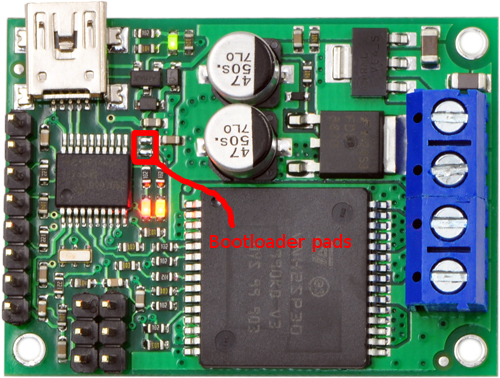
Another thing to try is getting the jrk in to bootloader mode using the bootloader pads (shown in the picture below). Disconnect the jrk from everything, short those two pads together by touching both of them simultaneously with a screwdriver or some other conductive tool, then plug the jrk in to USB. After doing that, you should see the green light double blinking (green light quickly turns on-off-on-off, then waits for about a second and repeats). It might take a few tries to get this right. After the jrk is plugged in to USB you can stop shorting the bootloader pads together. You should also see an entry in your device manager under the “Ports (COM & LPT)” list that says “Pololu umc02a Bootloader”.
-David
thanks david. it worked the only thing i had to do different was to short the bootloader while plugged into the usb …i guess the power helped? heres what i have…a 12volt wiper motor .a 2 channel aggresor radio. a hacked servo that i saughterd 2 wires directly to the motor to steal the 0 to 5 volt signal.and a 12 volt battery. i need the wiper motor to take the place of my hacked servo for the steering on my huge and heavy gas power rc dunebuggie…4 feet long and 50 pouds 10inch tires…can you help me figure out how to make my wiper motor not do a full revolution and also always center itself?..thanks for all your help david…rick
You need to set up the feedback part of your system, and then configure the jrk properly. In your case, I suppose you will be connecting the shaft/potentiometer of your hacked servo to the axle of wiper motor somehow, and then connecting the 0-5V output of the potentiometer to the jrk’s RX pin, and using the jrk’s Analog feedback mode.
The “Setting up your System” section of the Jrk’s user’s guide should help you do that and configure the jrk properly: pololu.com/docs/0J38/5
-David
Sorry, I meant to say “FB pin”. The FB pin of the Jrk is for feedback (analog or tachometer), the RX pin is for control (serial, analog, or pulse width).
thanks again for your help david…i dont want to bugger up my jrk12v12 again so i thought i would make sure i am going to hook up to the right pins on my jrk12v12 …so if i want my wiper motor to self center using the power that i stole directly off my rc servo motor i would connect one wire to feedback and one to ground because i will still be using the 6volt battery pack for my rc receiver? ps very impressed with the support you offer for this product and also the protection thats built in to help first timers like me not burn my jrk12v12 up…a very impressed user RICK
This description of your proposed wiring confuses me. I’m not sure which wires you have, where they come from, and where you are going to connect them on the jrk. What do you mean by stealing power off an RC servo motor? Maybe you should draw a picture, or just state your wiring plan more clearly (e.g. using one sentence per connection). Be sure to mention ALL your connections.
Here are some guidelines for wiring the jrk to make a system with analog feedback:
- You’ll need two wires going to the Jrk’s VIN and GND to power it.
- You’ll need two wires going from A and B to the motor terminals so the jrk can drive your motor.
- You’ll need an analog signal going to FB to provide feedback. The voltage on FB should indicate the position of your system.
If the FB signal comes from a potentiometer, you can power the potentiometer from the Jrk, using +5V or AUX for one pin, and using GND for the other. I recommend using the AUX pin because then the jrk can detect when the feedback potentiometer is disconnected (if you enable that feature).
-David