
Hello dear forum,
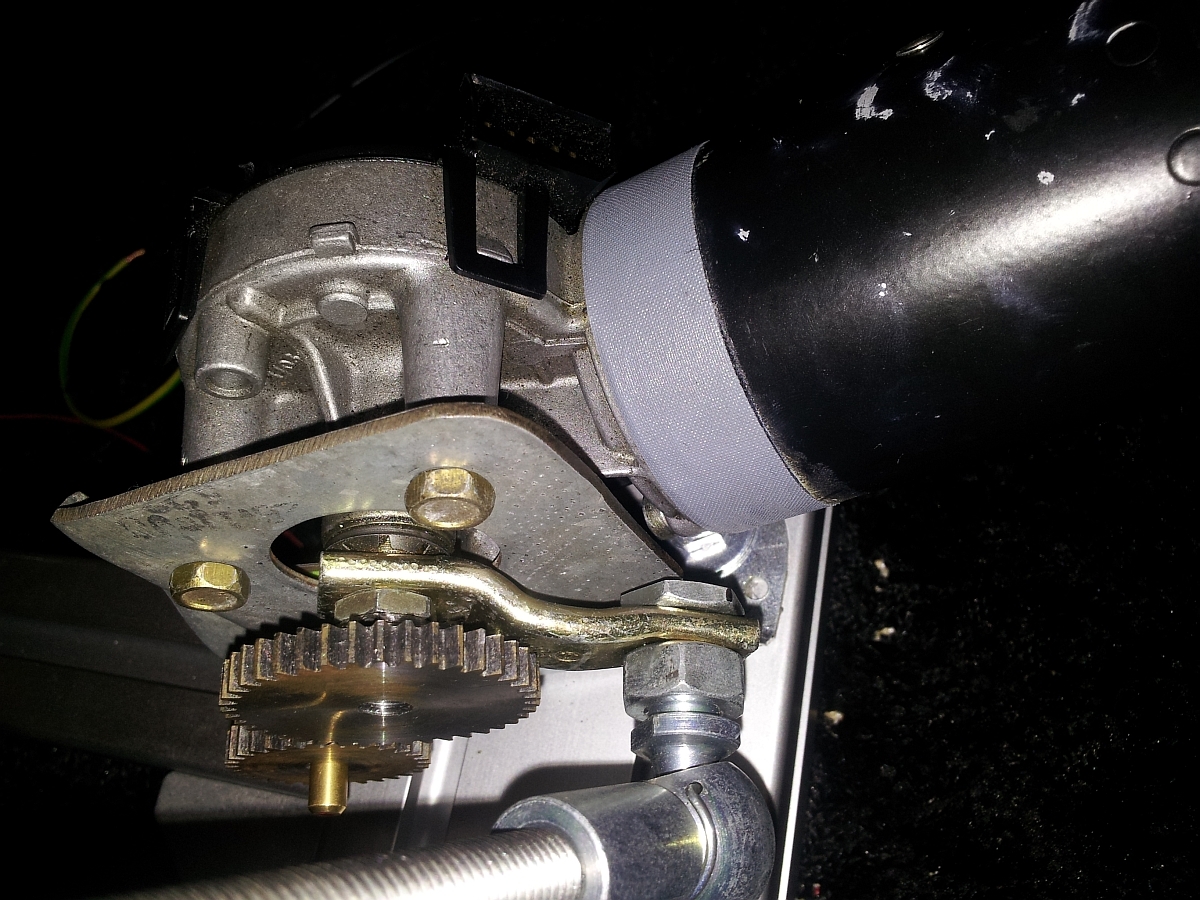
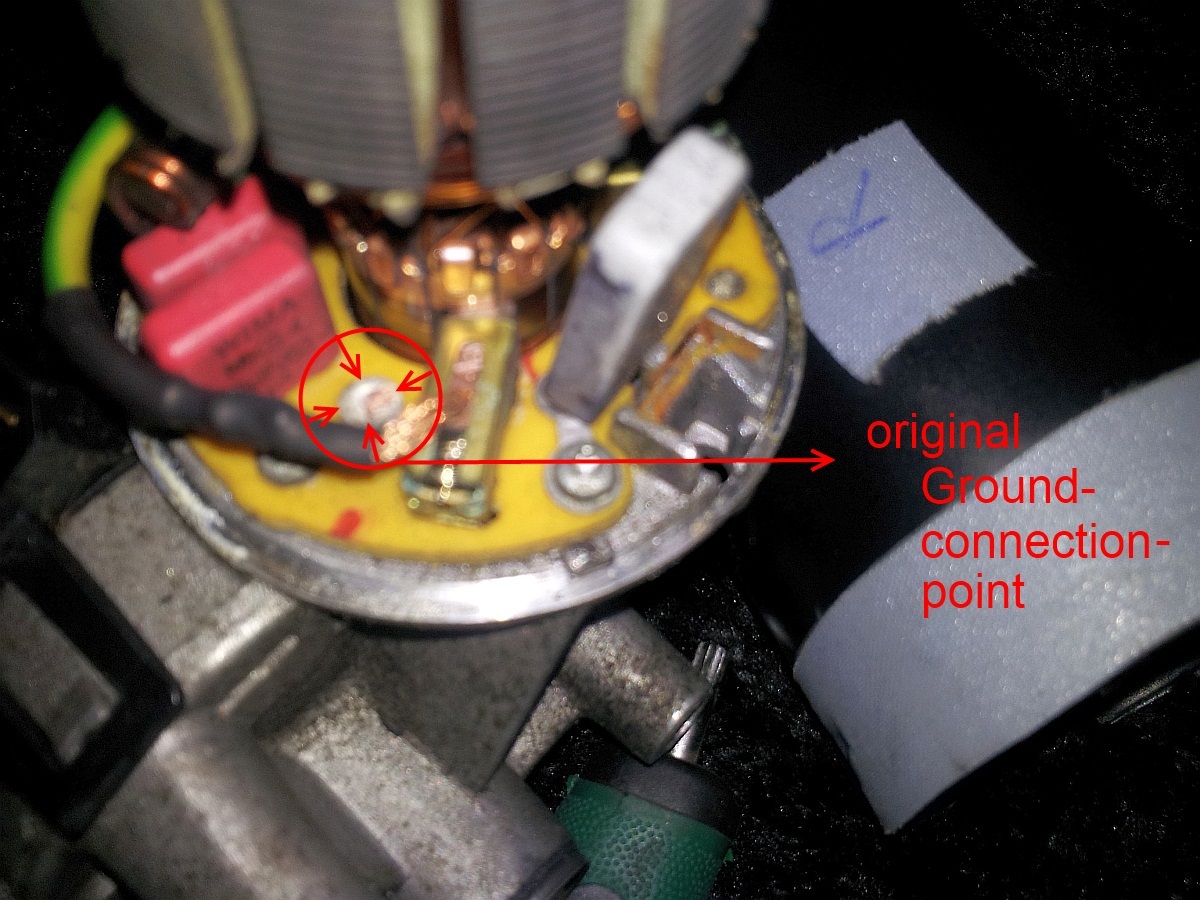
I build a Motion-Sim "http://www.x-sim.de/forum/viewtopic.php?f=3&t=268&p=1548#p1548. Using 2x Jrk 12v12; 2x wipermotor Vw Golf (ground wire soldered to the brush - so no bodyground like original); Techtron SP6015 Powersupply (13,8V 15-18A); 2x Potentiometer 10kohm - they are attached via gearing to the wipermotors for feedback. Win7 32bit, also tried Xp SP3 32bit and Win7 64bit with differnet usb-cables.
All connected like said in the manual - also the configuration utility (and driver) is installed like recommended.
On first test’s everything worked so far and i could set target via configuration utility. On the other day when i wanted to test i bit more one of the two boards was not recognized via usb. The green led blinked short after connecting - after that all lights off. I tried this on all usb-ports and different pc. I tried to connect ground and reset but nothing happens (vin, ground, motor, poti connected). There is no notification by windows if pluged in! Even in device manager no unknown device?
Ok so far very frustating espacially because i want to use my now machanically ready sim so badly ![]()
This testing with the board took me two days after work until i gave up. Found nothing similar on googel.
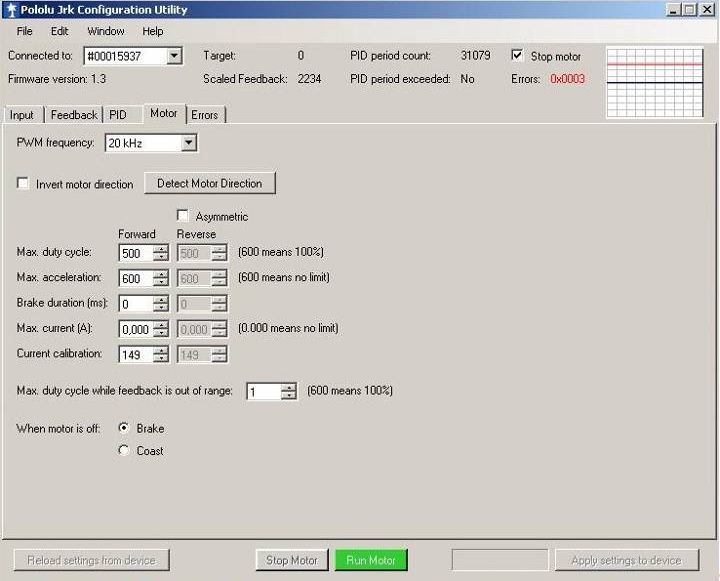
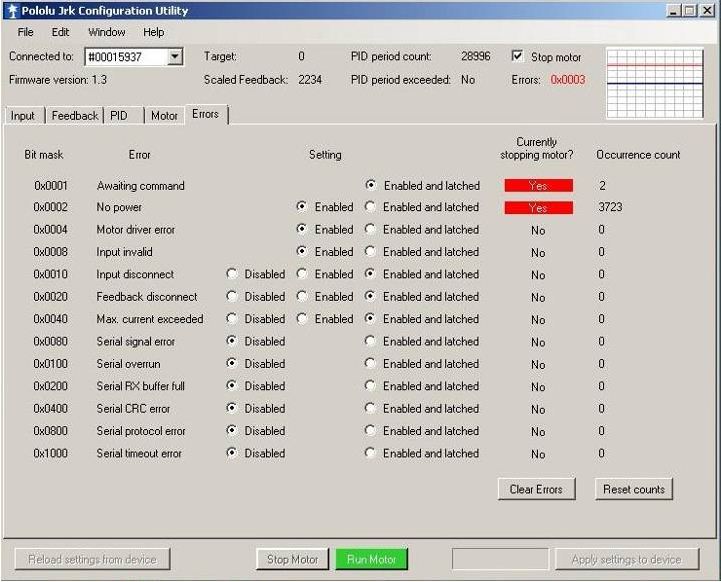
After that issiue i started to test with the working board and ordered one for safety/replacement for the other. I could not believe that this board is stressing now to. Here some screenshot’s and the error text:






error: "Informationen über das Aufrufen von JIT-Debuggen
anstelle dieses Dialogfelds finden Sie am Ende dieser Meldung.
************** Ausnahmetext **************
System.Exception: There was an error turning off the motor. ---> System.ComponentModel.Win32Exception: Control transfer failed.
bei Pololu.WinusbHelper.WinUsbDevice.controlTransfer(WINUSB_SETUP_PACKET setupPacket, Byte* buffer)
bei Pololu.WinusbHelper.WinUsbDevice.controlTransfer(WINUSB_SETUP_PACKET setupPacket)
bei Pololu.UsbWrapper.UsbDevice.MyWinUsbDevice.controlTransfer(Byte RequestType, Byte Request, UInt16 Value, UInt16 Index)
bei Pololu.UsbWrapper.UsbDevice.controlTransfer(Byte RequestType, Byte Request, UInt16 Value, UInt16 Index)
bei Pololu.Jrk.Jrk.motorOff()
--- Ende der internen Ausnahmestapelüberwachung ---
bei Pololu.Jrk.Jrk.motorOff()
bei Pololu.Jrk.MainWindow.setMotorState(Boolean motorOn)
bei Pololu.Jrk.MainWindow.motorOffButton_Click(Object sender, EventArgs e)
bei System.Windows.Forms.Control.OnClick(EventArgs e)
bei System.Windows.Forms.Button.OnClick(EventArgs e)
bei System.Windows.Forms.Button.OnMouseUp(MouseEventArgs mevent)
bei System.Windows.Forms.Control.WmMouseUp(Message& m, MouseButtons button, Int32 clicks)
bei System.Windows.Forms.Control.WndProc(Message& m)
bei System.Windows.Forms.ButtonBase.WndProc(Message& m)
bei System.Windows.Forms.Button.WndProc(Message& m)
bei System.Windows.Forms.Control.ControlNativeWindow.OnMessage(Message& m)
bei System.Windows.Forms.Control.ControlNativeWindow.WndProc(Message& m)
bei System.Windows.Forms.NativeWindow.Callback(IntPtr hWnd, Int32 msg, IntPtr wparam, IntPtr lparam)
************** Geladene Assemblys **************
mscorlib
Assembly-Version: 2.0.0.0.
Win32-Version: 2.0.50727.5456 (Win7SP1GDR.050727-5400).
CodeBase: file:///C:/Windows/Microsoft.NET/Framework/v2.0.50727/mscorlib.dll.
----------------------------------------
JrkConfigurationUtility
Assembly-Version: 1.2.1.0.
Win32-Version: 1.2.1.0.
CodeBase: file:///C:/Program%20Files/Pololu/Jrk/bin/JrkConfigurationUtility.exe.
----------------------------------------
System.Windows.Forms
Assembly-Version: 2.0.0.0.
Win32-Version: 2.0.50727.5460 (Win7SP1GDR.050727-5400).
CodeBase: file:///C:/Windows/assembly/GAC_MSIL/System.Windows.Forms/2.0.0.0__b77a5c561934e089/System.Windows.Forms.dll.
----------------------------------------
System
Assembly-Version: 2.0.0.0.
Win32-Version: 2.0.50727.5456 (Win7SP1GDR.050727-5400).
CodeBase: file:///C:/Windows/assembly/GAC_MSIL/System/2.0.0.0__b77a5c561934e089/System.dll.
----------------------------------------
System.Drawing
Assembly-Version: 2.0.0.0.
Win32-Version: 2.0.50727.5462 (Win7SP1GDR.050727-5400).
CodeBase: file:///C:/Windows/assembly/GAC_MSIL/System.Drawing/2.0.0.0__b03f5f7f11d50a3a/System.Drawing.dll.
----------------------------------------
Jrk
Assembly-Version: 1.1.0.0.
Win32-Version: 1.1.0.0.
CodeBase: file:///C:/Program%20Files/Pololu/Jrk/bin/Jrk.DLL.
----------------------------------------
System.Windows.Forms.resources
Assembly-Version: 2.0.0.0.
Win32-Version: 2.0.50727.5420 (Win7SP1.050727-5400).
CodeBase: file:///C:/Windows/assembly/GAC_MSIL/System.Windows.Forms.resources/2.0.0.0_de_b77a5c561934e089/System.Windows.Forms.resources.dll.
----------------------------------------
UsbWrapper
Assembly-Version: 1.1.0.0.
Win32-Version: 1.1.0.0.
CodeBase: file:///C:/Program%20Files/Pololu/Jrk/bin/UsbWrapper.DLL.
----------------------------------------
mscorlib.resources
Assembly-Version: 2.0.0.0.
Win32-Version: 2.0.50727.5456 (Win7SP1GDR.050727-5400).
CodeBase: file:///C:/Windows/Microsoft.NET/Framework/v2.0.50727/mscorlib.dll.
----------------------------------------
************** JIT-Debuggen **************
Um das JIT-Debuggen (Just-In-Time) zu aktivieren, muss in der
Konfigurationsdatei der Anwendung oder des Computers
(machine.config) der jitDebugging-Wert im Abschnitt system.windows.forms festgelegt werden.
Die Anwendung muss mit aktiviertem Debuggen kompiliert werden.
Zum Beispiel:
<configuration>
<system.windows.forms jitDebugging="true" />
</configuration>
Wenn das JIT-Debuggen aktiviert ist, werden alle nicht behandelten
Ausnahmen an den JIT-Debugger gesendet, der auf dem
Computer registriert ist, und nicht in diesem Dialogfeld behandelt."
This board is not every time recognized via usb. When it is then it is listed in device manager. In configuration utility i can do nothing - there is even no firmware number shown.
Don’t know what to do - I sended the boards back so someone “professional” can have a look. I really like the configuration and the boards are good to use with x-sim and uso commands. Please let me know where my mistake could be? Support was contacted previous.
Regards yoko







 Even at the 5A the motors felt very strong while playing with “set value” (when everything eas working
Even at the 5A the motors felt very strong while playing with “set value” (when everything eas working  ).
).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}