
Hi!
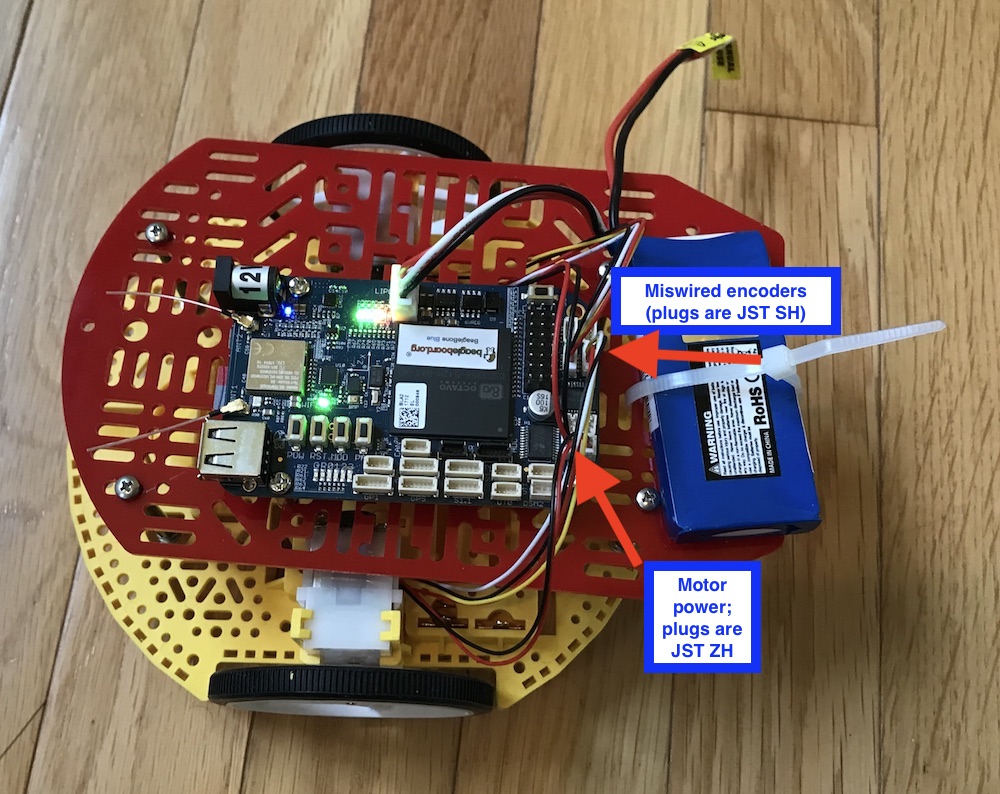
I purchased a Romi chassis and hope to run it from my Beaglebone Blue controller, as shown in the photo below. This post is about how to operate the motors so that the wheels spin in the same direction. Power to the motors is shown in the photo below: there are 4 plugs on the Beaglebone Blue which are 2 pin, 1.5mm pitch, JST ZH connectors. In my implementation, these power wires are running to the “M1” and “M2” pins on a “Magnetic Encoder Pair Kit for Mini Plastic Gearmotors”, product #1523. In each case, the red wire goes to M1, and the black wire goes to M2.
The Beaglebone Blue controller is connected to my home network by wifi. The Beaglebone runs the latest available “IoT” image and the software is fully up to date. I am able to log in to the Beaglebone over ssh. When I run the command 'rc_test_motors", the wheels spin just fine, but one spins forward and the other spins in reverse.
How do I get each wheel to spin in the same direction? Is this a matter of learning the control software that came with the “IoT” linux distribution? Or should I reverse the connections on one of the M1/M2 pins for one motor?
Note that I can’t simply reverse a plug at the controller end: it won’t fit properly into the JST ZH housing, since the housing and plug are keyed.
Thanks a ton!
Bob
This shows the motor connectors. I discuss the miswired encoder connections in a separate post so please ignore that.
This shows how I wired the encoders:
