
I use the 32u4 zumo robot .when I program line follow to cross white space the robot usualy return . the robot think it is the end line . how to edit it . and how to command the robot to turn right when it reach cross.
thank you
alongkorn butkasok
Hello, Alongkorn.
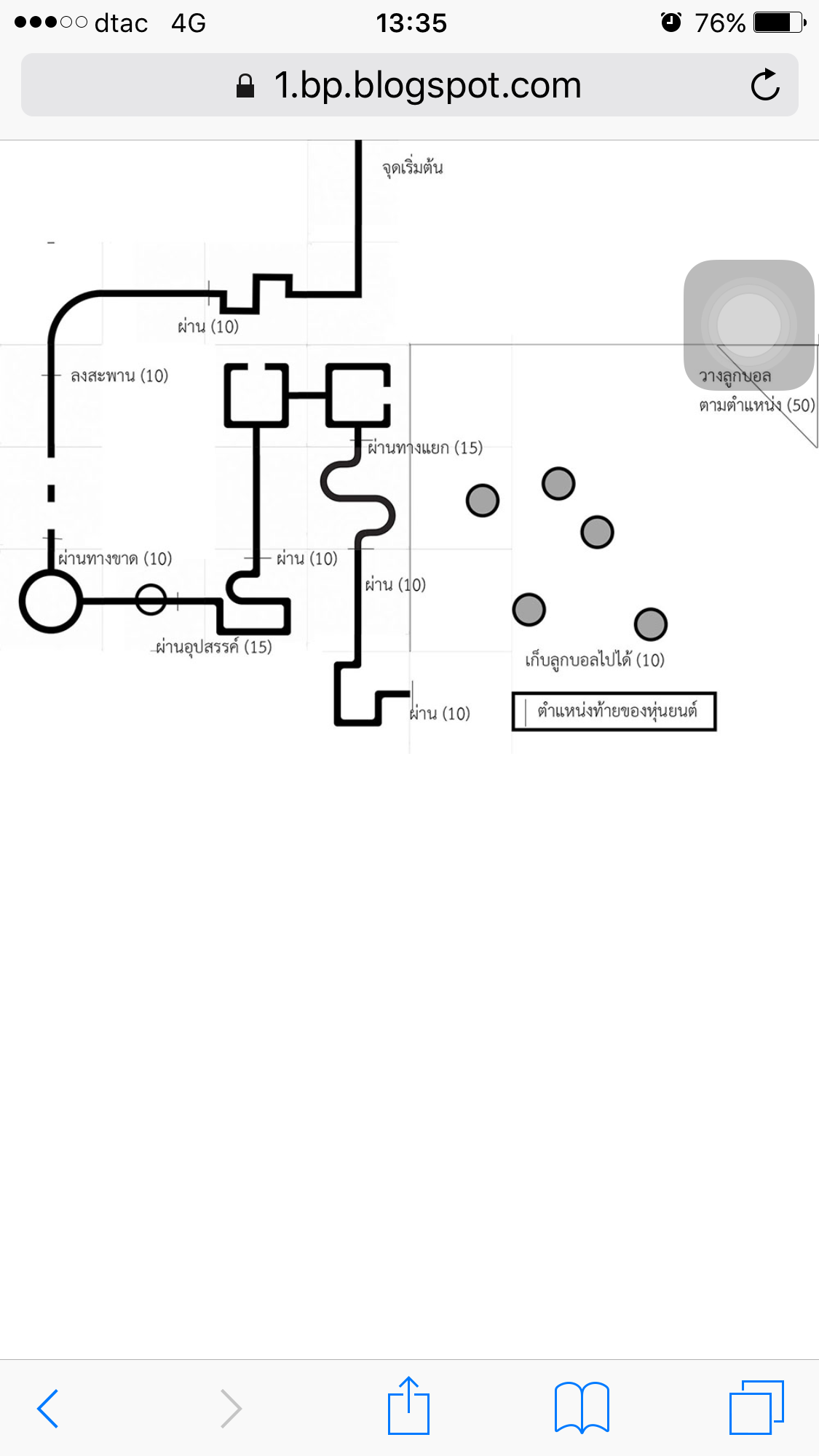
It sounds like you are trying to modify our example maze solving sketch for the Zumo32u4 but are running into trouble. What have strategies have you tried so far to address the issues? Could you post the code you have been working on? A picture of the course you want to run your robot on might also help people give you advice.
- Amanda
How. To program. To. Pass. Dash line. When. The robot. Reach. Dash line. It will tern back. Every time
I use. Program. Follow line. From. Example
We do not have any line-following examples that follow dashed lines. What strategies have you tried in your code to approach the problem? Can you post that code here?
- Amanda
hi
how to program A-star 32u4 to follow line white line on the black background.
and where I can study the command of A-star 32u4.
If you are using the QTR Reflectance Sensor library, setting the white_line argument of the readLine() function to 1 allows you to detect a white line on a dark background. For more information on how that function works, see its function definition in QTRSensors.cpp in the library.
For the complete documentation of the A-Star 32U4 Arduino Library, including its main and component classes and functions, follow the link under the “Documentation” section on its GitHub page.
- Amanda
thank for your help.