
I use Power HD High-Speed Digital Micro Servo DSM44 with Arduino Uno micro controller and Adafruit servo shield on 6V 8A power supply about for 5 month successfully.
By some reason, motor does not moves anymore. I’m trying to figure out, if I am able to find the problem and fix it some way.
Intensive mass acceleration on this particular motor with load is 56 grams.
The failure occurred on its own, without stretching the wires, drop of device, or pressure against the limit, since there is no such in mechanism and angle degree was measured previously, as I have already said, it was working for several months.
Here is description of behavior of motor after failure:
-
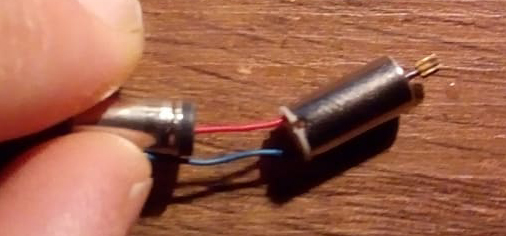
Normally gear of the working motor rotates if you turn it manually (what is highly not recommended to do), I just give this example to describe the state of the motor after damage, because now this motor does not rotates from the external gear, but still rotates from DC motor gear manually. If motor were stuck for some mechanical reason, then I guess the rotation would not be possible from both sides, I’m not sure. Otherwise it must be some kind of failure with solenoid, maybe
-
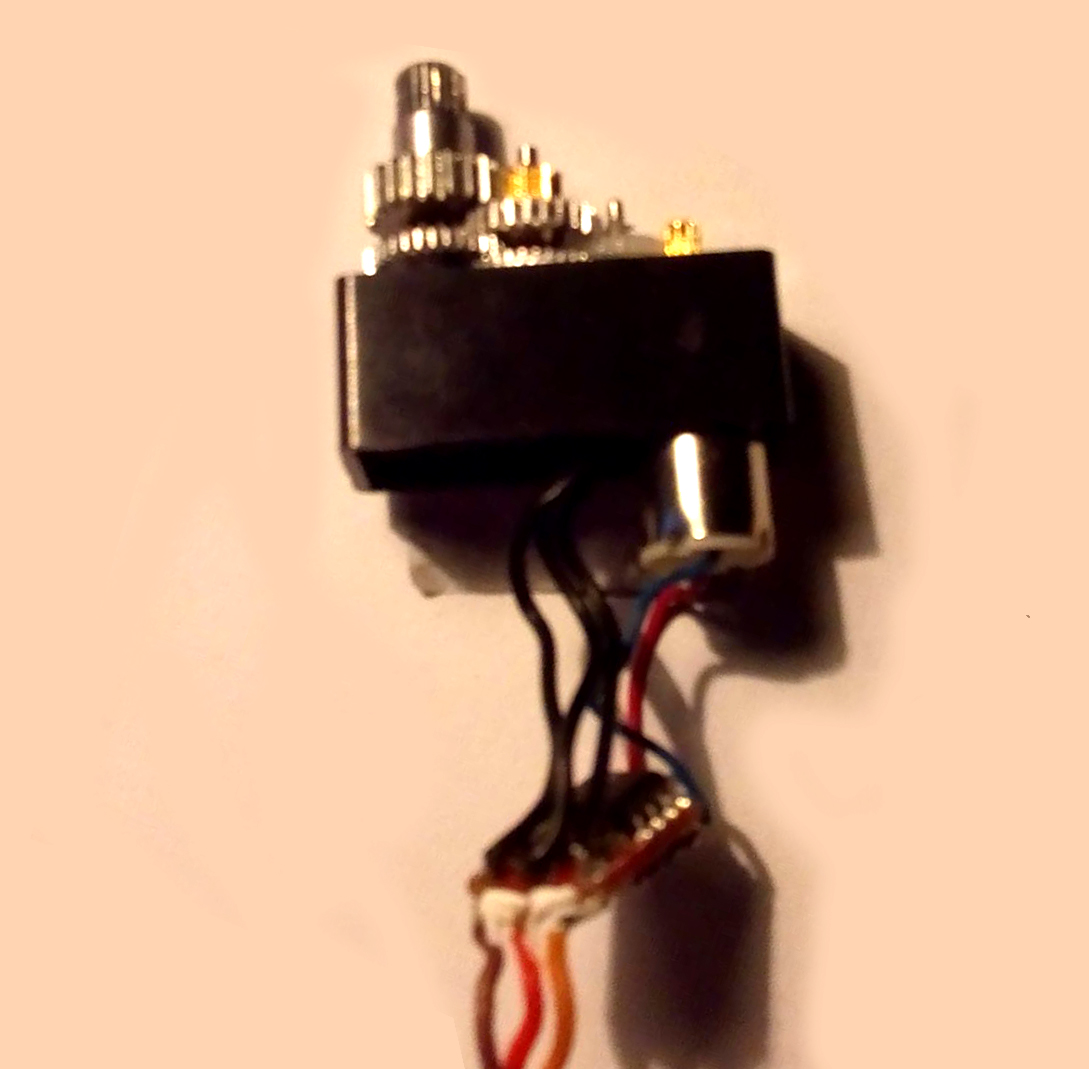
Visually all contacts inside looks good, wires are not connected anywhere to each other or disconnected from control circuit.
-
With giving of PWM to motor, h-Bridge on IC gets hot, but motor does not moves. I’m not sure, but as I know semiconductors usually fail short-circuit which would explain heat with no movement and no visible damage. So, there must have been a short-circuit, but in the past this had already happened and the motor didn’t fail completely
-
If particular damaged motor connected to the shield, when disconnecting USB from PC and keeping power adapter connected to shield, other motors begin to move by itself out of control with random angles. Similar behavior was observed if wires inside of some motor are in contact, which I’ve fixed once with soldering and varnishing of contact, but now problem looks different
-
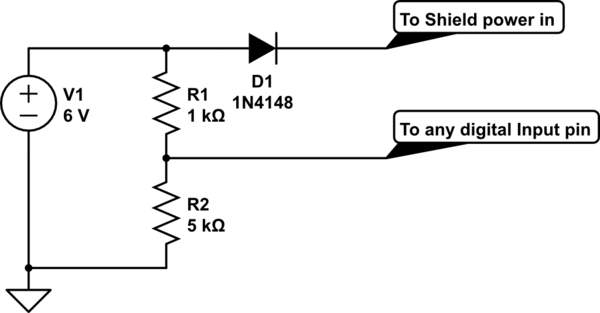
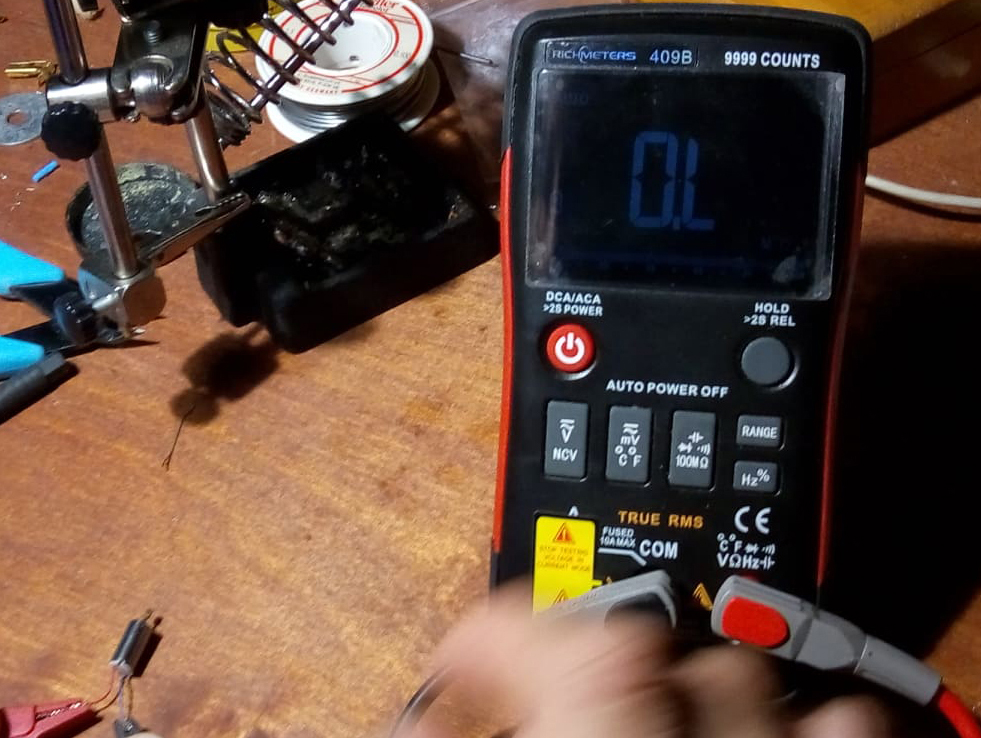
Disconnected motor V+ and Gnd with 2000 Ohm LCR meter shows 549, when all other DSM44 working servos shows the same 561
Any advice, guide or example would be very helpful


{kind=link}