
Hello,
I am looking for help using this motor
Stepper Motor: Bipolar, 200 Steps/Rev, 42×38mm, 2.8V, 1.7 A/Phase
with this driver
DRV8834 Low-Voltage Stepper Motor Driver Carrier
I am using this power supply to drive the motor
Wall Power Adapter: 5VDC, 3A, 5.5×2.1mm Barrel Jack, Center-Positive
All of this is from Pololu. I am trying to drive the motor using an Arduino and the AccelStepper library.
I am able to move the motor forward and backwards and to change the speed reliably. The issue is that within minutes (2-3), the drive overheats and begins to smoke. This only happens if both he Arduino and the driver are powered. So something seems to be wrong with how I’m doing this. The driver only gets hot if everything is plugged in, but it still gets hot if I set the motor speed to zero.
This is the simple Arduino code that I am using.
// ConstantSpeed.pde
// -*- mode: C++ -*-
//
// Shows how to run AccelStepper in the simplest,
// fixed speed mode with no accelerations
/// \author Mike McCauley (mikem@airspayce.com)
// Copyright (C) 2009 Mike McCauley
// $Id: ConstantSpeed.pde,v 1.1 2011/01/05 01:51:01 mikem Exp mikem $
#include <AccelStepper.h>
AccelStepper stepper(1,3,2); // Defaults to AccelStepper::FULL4WIRE (4 pins) on 2, 3, 4, 5
void setup()
{
pinMode(4, OUTPUT);
digitalWrite(4, HIGH);
stepper.setMaxSpeed(1000);
stepper.setSpeed(0);
}
void loop()
{
stepper.runSpeed();
}
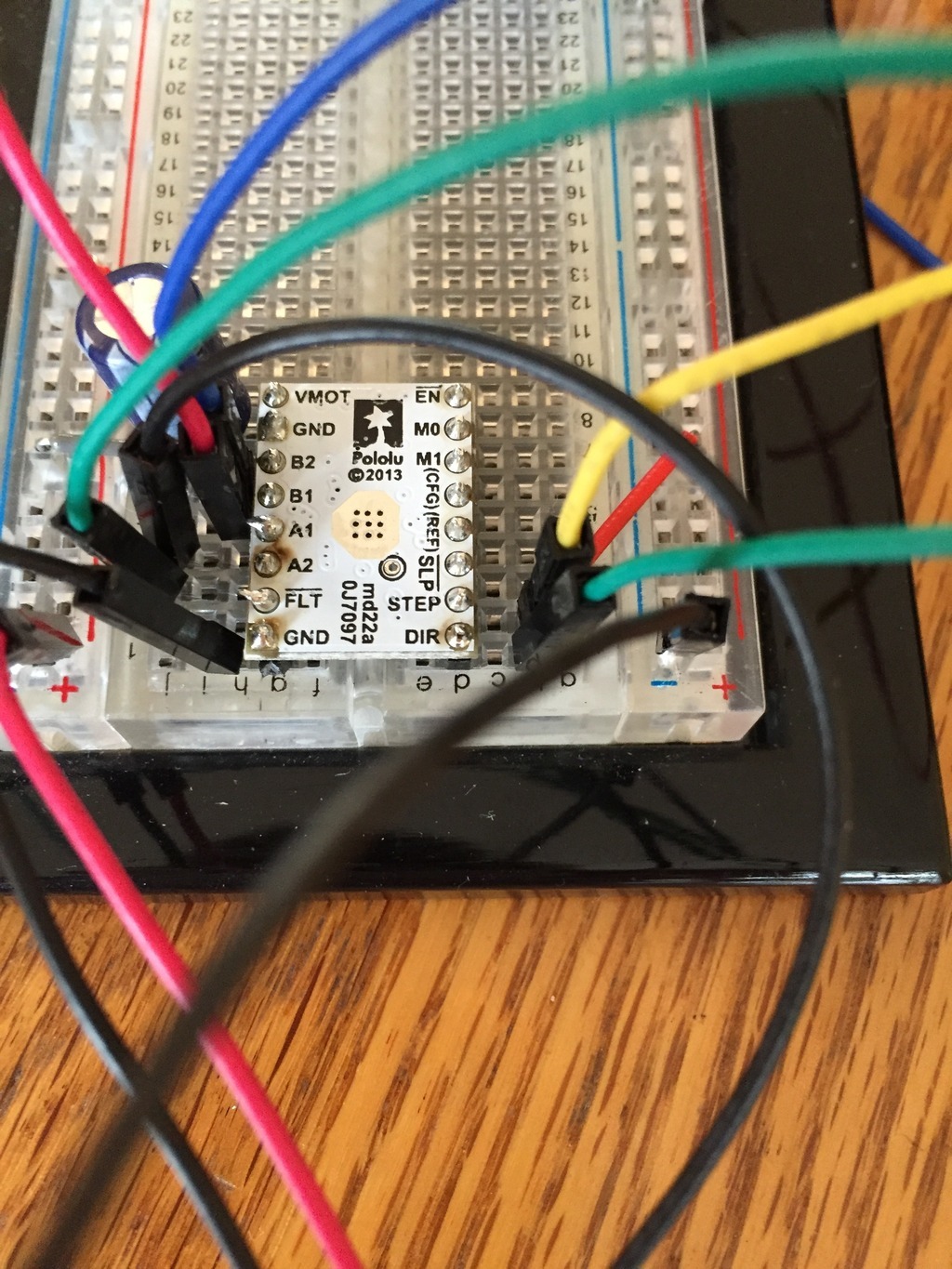
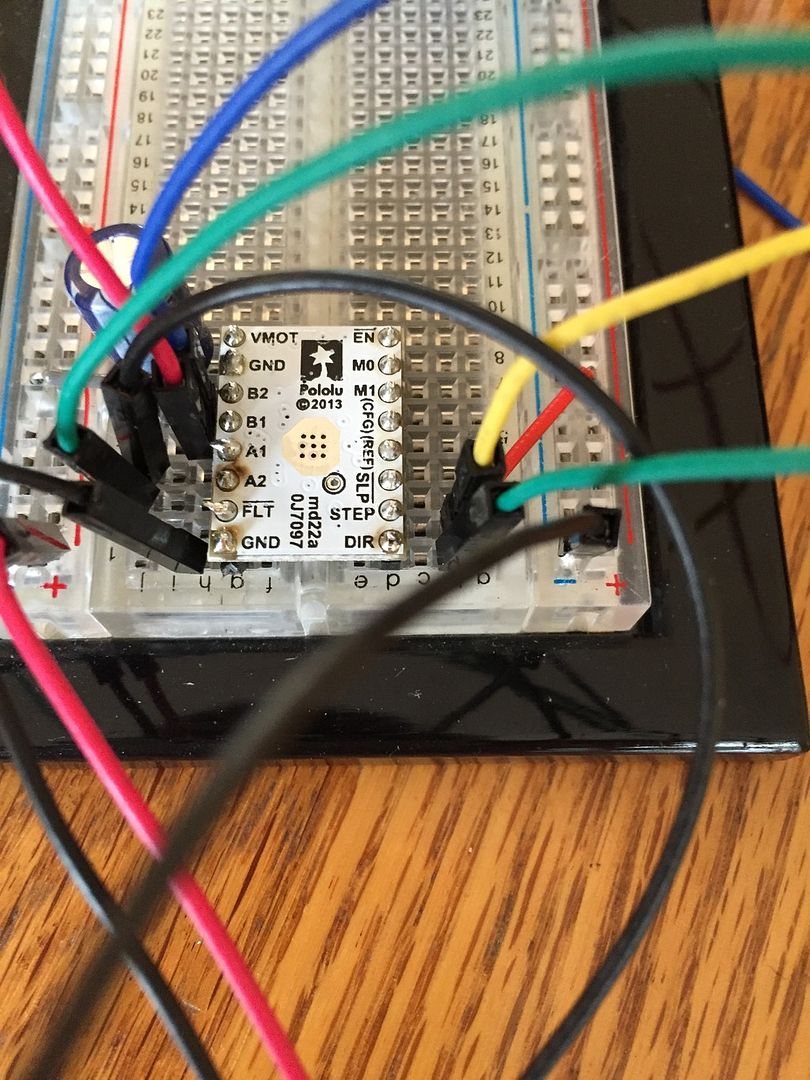
The way I have it connected is the 5V 3A power supply going to VMOT and GRND. There is a 100 uF capacitor also across VMOT and GRND. The controller ground goes to the bottom left GND and 5V from the controller also goes to SLP. Two pins from the Arduino 3 goes to STEP and 4 goes to DIR. The 4 motor wires go to B2,B1,A2,A1. As long as the motor turns, does it matter exactly which goes where? Thank you for any help you can provide. We are using this to build a bank or syringe pumps for my lab. All of the pumps were laser cut by Pololu!
Here is a picture of the wiring
i1003.photobucket.com/albums/af1 … G_2434.jpg
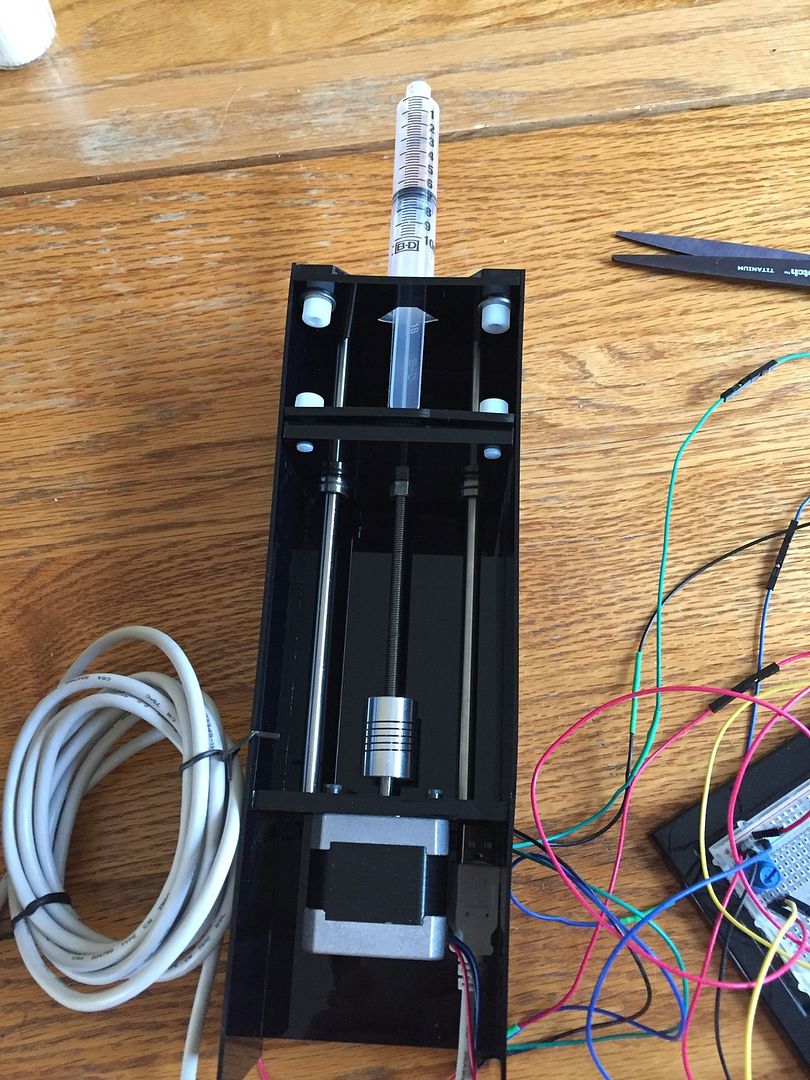
Here is a picture of the syringe pump (just for fun)
i1003.photobucket.com/albums/af1 … G_2435.jpg
Thanks a million!
FB

{kind=link}
{kind=link}