Hi,
Im trying to drive some DELTA SA20S36F motors using the low voltage DRV8834 Drivers
with some some success but having a few issues with micro stepping
They are 5v Bipolar motors with 36 steps per rev with a 300 deg rotation with built in hardstops
the winding resistance is 180 ohms
I have no idea what the phase current is but im guessing 80ma or less seen it listed as this on a site selling them and the instrument cluster they came from was driving them direcly with a risc processer with a 120ma limit on its digital outs
the drivers remain cold to to the touch and the motors barely get warm after a few minutes of use so hopefully I have the current limits set right
Im using a Arduino uno clone and the laurb9/StepperDriver library
with micro stepping set to 32 or 16
I cant seem to get the motors to move just 1 single step and have to tell it move 5 to 15 steps before it actually moves depending on the position its currently at
It will however move to a particular position and back again reliably
The movements are also quite jittery at lower rpms
Could this be a timing issue with the motors requiring different pulse widths from the library?
Regards,
Chris
Hello, Chris.
Using Ohm’s law with your stepper motor’s rated voltage and coil resistance it seems like the per phase current should be 28 mA. That would correspond to setting the potentiometer so that VREF is only 14 mV on our DRV8834 carrier, and it might not work well with a current limit that low.
Can you post some pictures of your setup, including close-up pictures of the driver? What are you using to power your stepper motor and driver, and does your motor handle moving single steps at a time better when it is in full stepping mode?
- Patrick
Hi,
Patrick Thanks for the Reply
I Searched high and low for the full specs for the motors as the data sheet is quite sparse
a seller on alibaba had the motor current listed as 80ma hence my guess
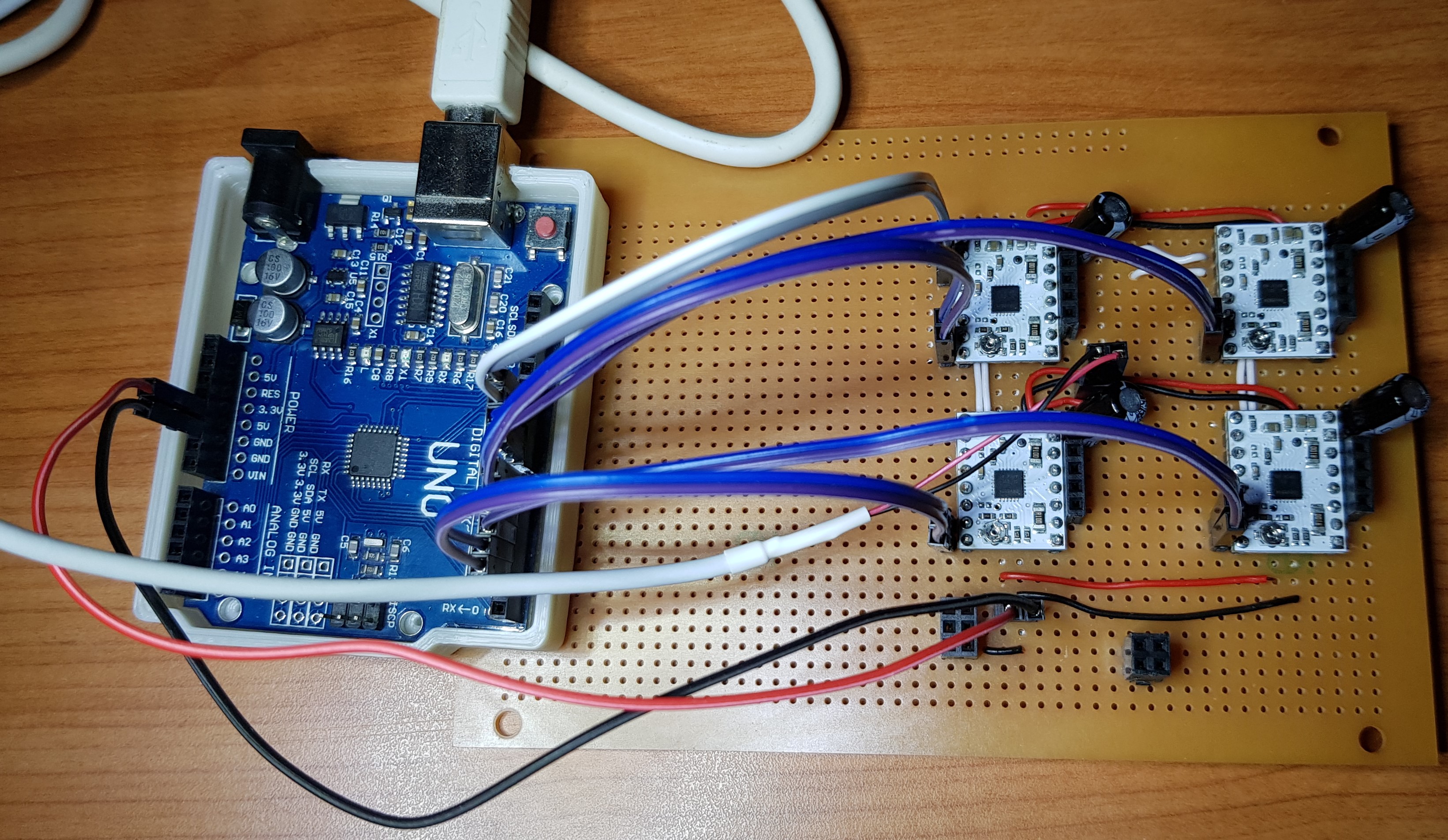
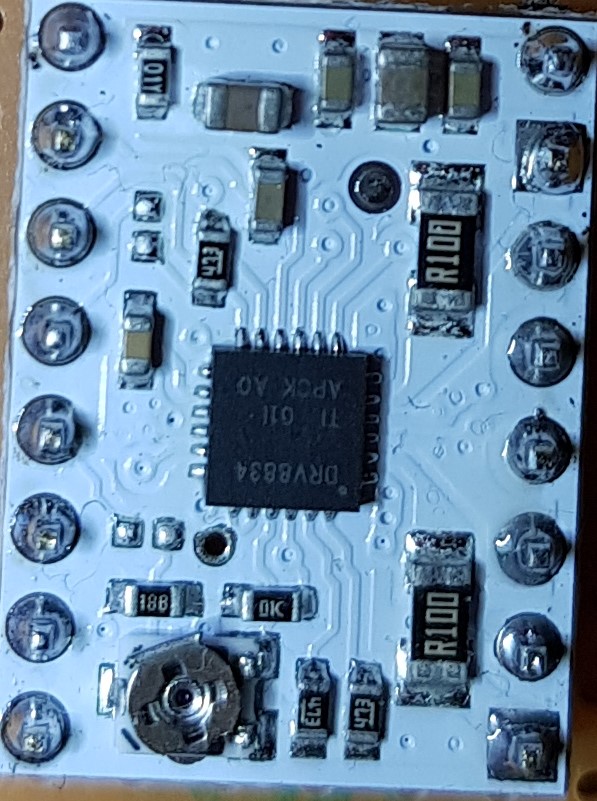
Here’s some pics of the driver and setup without the motors connected
the circuit in the pics will be hard to follow but basically all the m0 m1 are connected to save pins
the motor power for all 4 Drivers is 5v 2 amps & the caps are 100uf 25v
and the logic 5v power from the Arduino is shared with all 4 Drivers to the logic gnd and sleep pins
I just tried full stepping mode and it works ok but at only 36 steps its not pretty
So could too much current be the issue ?
Regards,
Chris
Thanks for the pictures. All of the connections I can see look okay, and if the soldering on all of your drivers looks the same as the soldering in your close-up picture, that should be okay too.
Since your driver and motor are working well in full-step mode, it seems likely that you are just running into a limitation of how well this combination of motor driver and motor can handle microstepping with currents this low. Keep in mind, high microstepping modes like 1/32-step mode are generally more useful for getting smoother motion rather than higher position resolution since it may not be practical for the stepper to hold position at many of those steps. Achieving precise position control with a stepper motor generally requires using a gearbox and/or encoder. You might get better results by raising the current limit so there is more power energizing the coils, but based on the voltage rating and coil resistance specs I mentioned in my last post it seems like you might already be running a risk of damaging your motor with too much current.
- Patrick