Hi All,
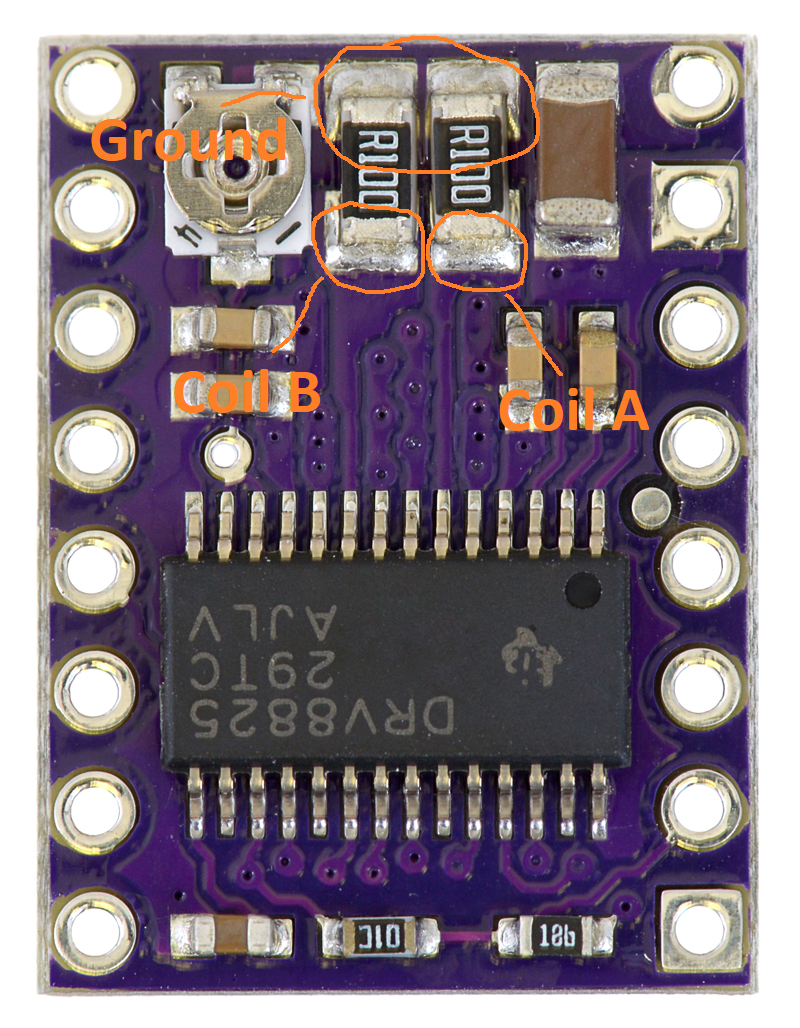
Currently working on a uController project and using the DRV8825 to drive a stepper motor in full-step down to 1/32 step modes.
The motor is a 4 wire bipolar, nema 11, 1.8 degrees, 8V, 0.67Amp (motor current limit is set, input signals are 3.3V and the motor supply is 24V)
The motor runs, not a problem there… but I noticed it was a little ‘choppy’ in microstep modes - ie: not as smooth as I thought it would be (I also run several Gecko drives elsewhere in uStep mode and are perfectly smooth)
I connected a DSO to check the wave forms (with NO MOTOR LOAD connected) and here’s what I have found -

This is 20 PPS, in Full Step mode. Yellow trace is the step input, Green trace is one leg of the motor coil (output 1A). Pretty much what I would expect to see
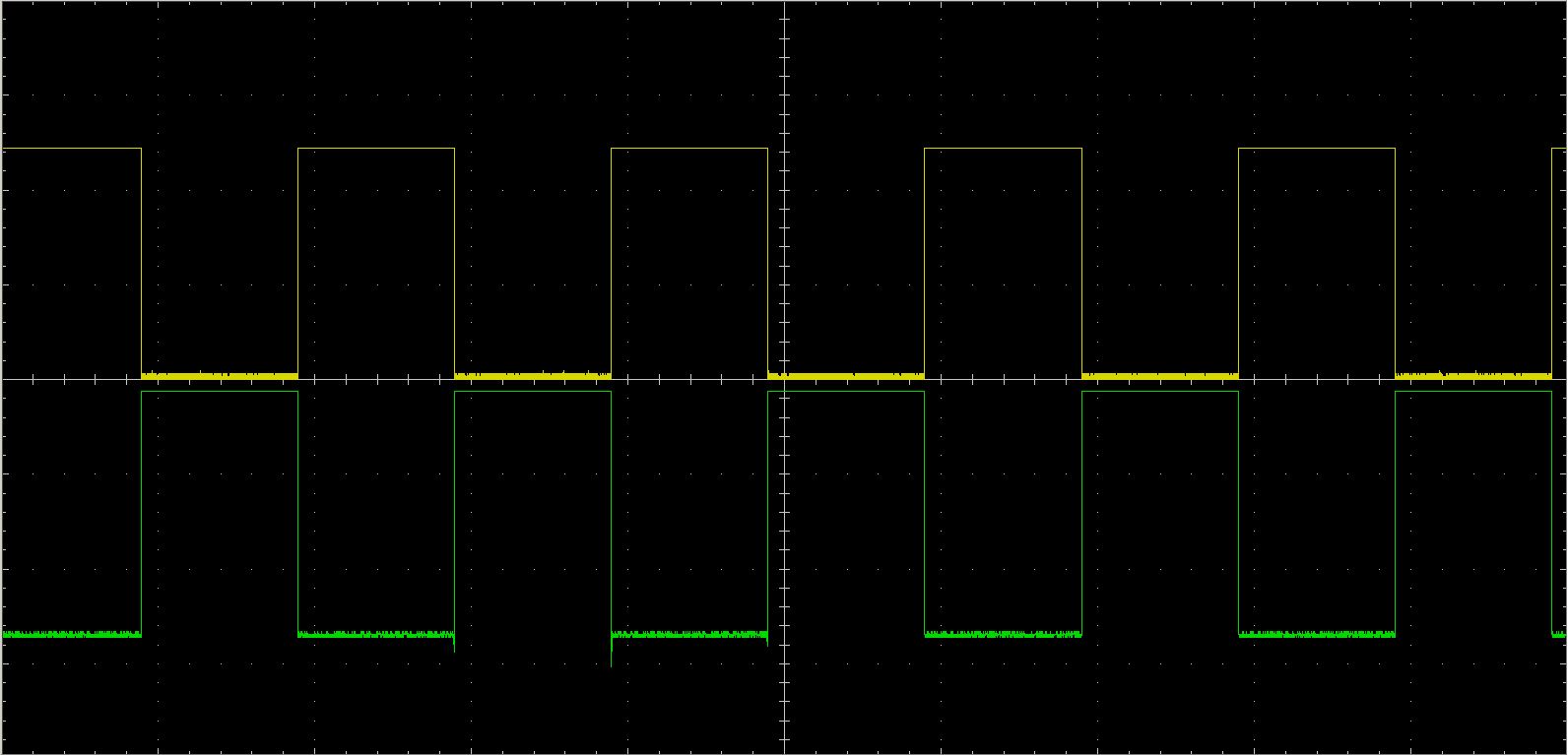
Here’s the result of Full Step with the DSO on the 1A and 1B Outputs. Again, nice and clean
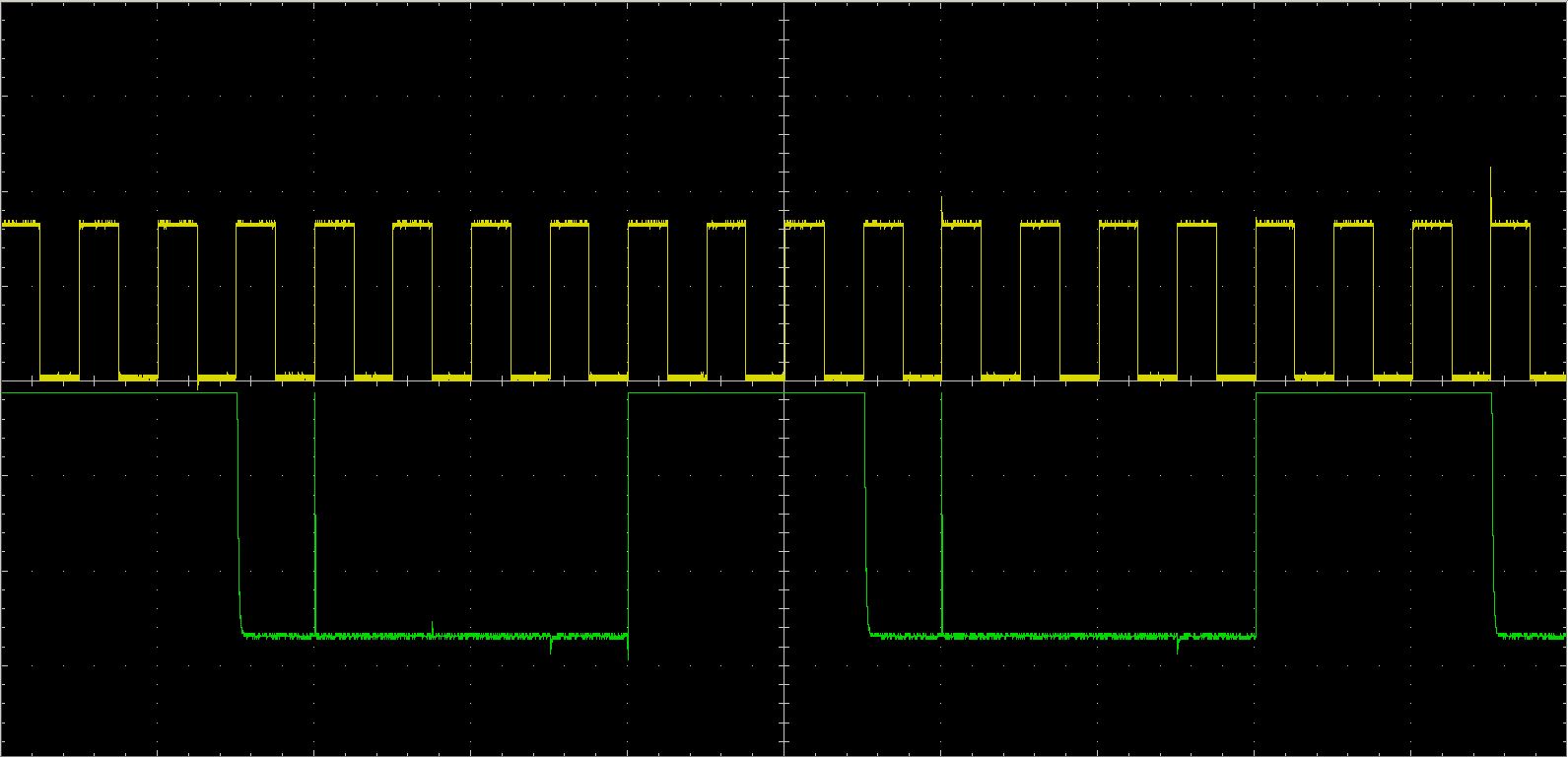
This one is the same conditions (in/out), but running in Half-Step mode. It seems now that I’m missing a third of my motor driving output (which is now in the form of a sharp pulse)

Again, the same output conditions, but the result of the half-step setting…
ALL microstepping modes have the same resultant waveform.
Is this normal or am I missing some setup parameters? I would expect to see a clean output waveform right across the stepping modes (the only thing to change would be the input pulse count to the output frequency)
So, is there something I should be looking at or is this what is meant to be?