Hi,
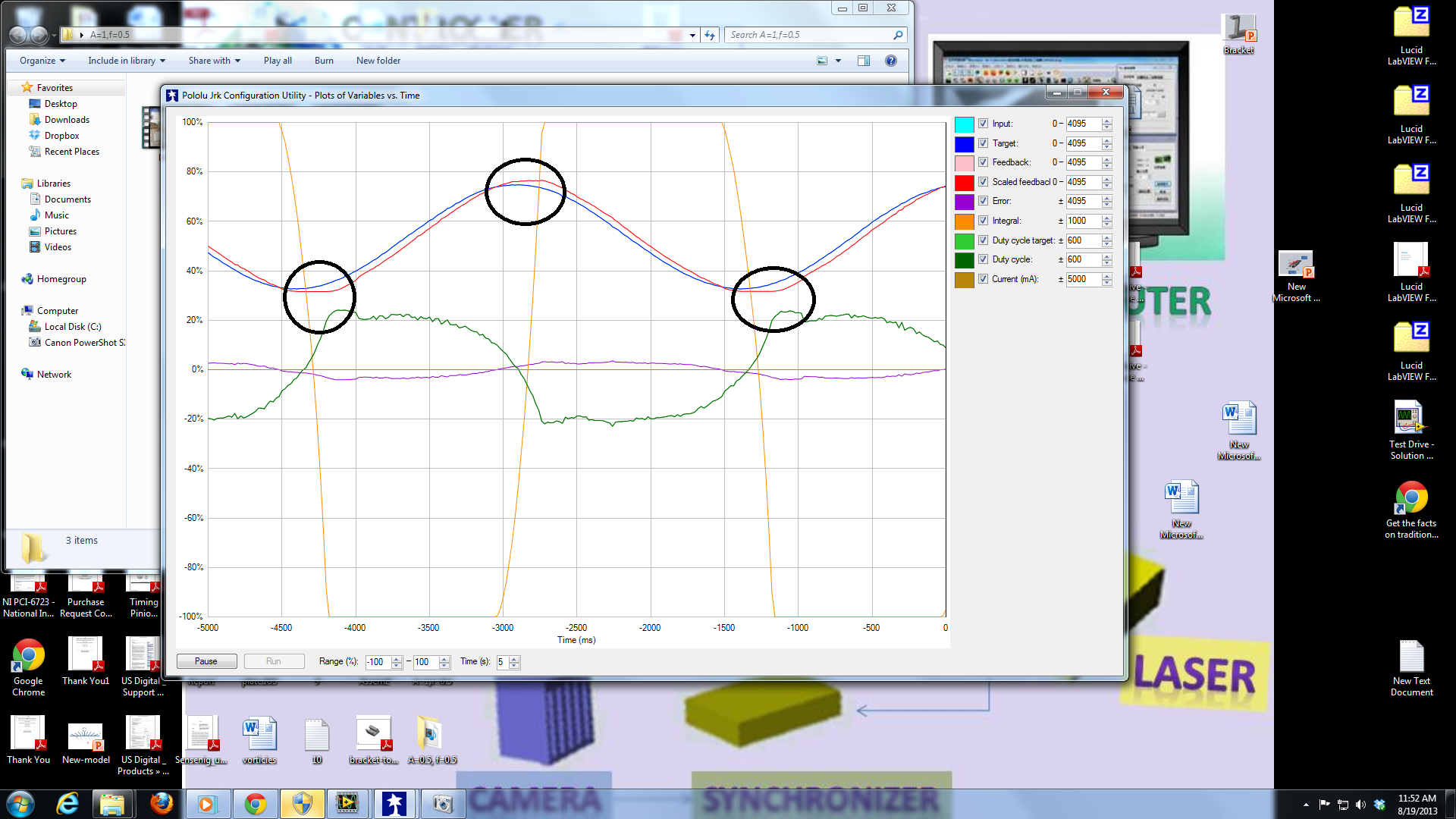
With this, I am sending the Jrk 21v3 configuration utility plot. As you see, there is a difference between the input signal and sensor’s output signal (dead zone
when the motor is changing direction).
I also sent the settings file to diagnose the issue.
Could you please help us to diagnose the issue?
Thank you,
Dead-zone.txt (1.38 KB)
I am sorry you are having problems with your jrk motor controller. You currently have your current limit set to 111 mA, and the jrk’s current limiting feature is not intended for such small currents. Could you try removing your “Max. current” limit (which can be done by setting it to “0”)?
If this does not help you, could you post a new graph with “Integral”, “Duty cycle target”, and “Duty cycle” checked?
- Zeeshan
I see some improvement, but still is not perfect. I am sending you the new graphs with all options checked.
Your helps will be appreciated.
Thanks,
Farhad
Thanks for posting the new graph. You might try adjusting your PID parameters. I suggest increasing your “P” term as a start. You might consider reading the PID tuning instructions in the “Setting Up Your System” section of the jrk user’s guide.
- Zeeshan