Hi All,
I need to use 36v4 through python (firmata) so I try to activate to motor without using any arduino library.
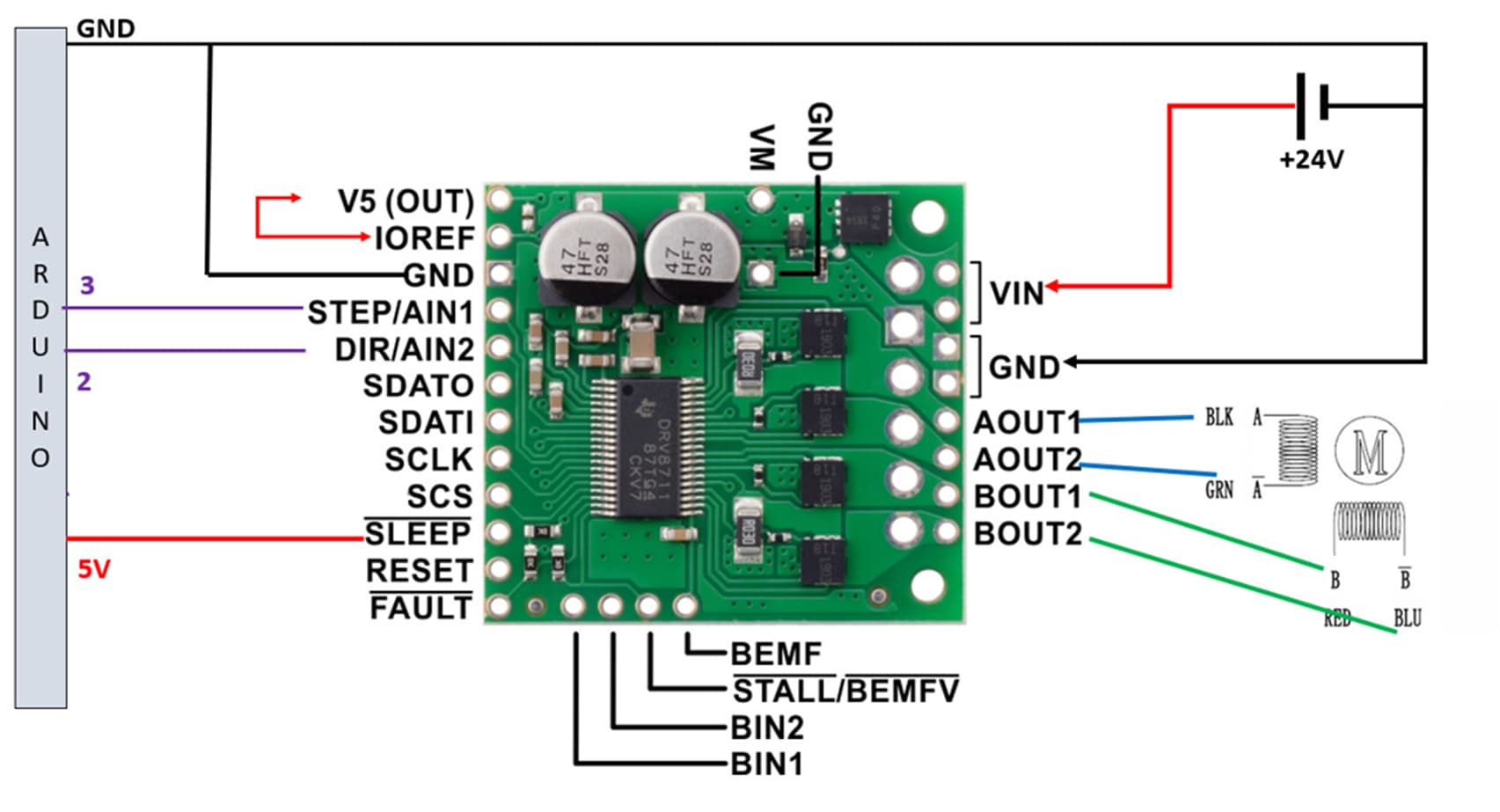
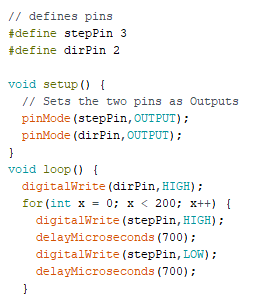
This is the pinout and basic IDE code I tried with no sucess
As described in the 36v4 driver’s product page description, while the driver allows control of a stepper motor through a simple step and direction interface, it must first be enabled and configured through its SPI interface after each power-up. In particular, when the driver powers up, the current limit setting defaults to the maximum (~18 A), which can cause the board to damage itself (and possible your stepper motor), so you will need to make sure to configure it to something appropriate before activating the outputs!
Using our library is a good way to send the necessary SPI commands, at least for initial testing. If you cannot use it in your final application, it might still be a useful resources to look at as a reference while you write your own code for the SPI communication.